- Роботека
- О сайте
- Вы здесь
- Что такое робот-андроид. История развития
- История появления первого Андроида
- Гиноид. Робот-женщина
- Хронология создания и развития роботов-андроидов
- Шесть самых современных андроидов, намекающих на наше синтетическое будущее
- Первый андроид-телеведущий
- BINA48
- Geminoid DK
- Джунко Чихира
- Надин
- София
- Ксеноботы: живые нанороботы из клеток лягушки
- Основа исследования
- Результаты исследования
- Эпилог
- Немного рекламы 🙂
Роботека
О сайте
Роботека — мир роботов, история, персонажи кино и литературы, анимации и игрушек.  |
Вы здесь
Что такое робот-андроид. История развития
Андроид представляет собой человекоподобного робота, функционирующего благодаря синтетическому организму с электронной системой мозга. При этом в теле робота могут быть различные органы настоящих людей, не уступающие ни по внешнему виду, ни по функциональности настоящим. Андроиды популяризированы в киноиндустрии, однако встречаются впервые именно в книгах зарубежных фантастов.
История появления первого Андроида
Роль создателя первого механического андроида отводится Альберту Кельнскому. Именно пот создал, согласно историческим данным, в середине 13 века первого «железного человека», наделенного способностью открывать и закрывать двери. Существует множество легенд о первом подобном роботе вплоть до того, что на самом деле он был самообучаем, и со временем научился говорить. Согласно городским мифам, ученик великого ученого Кельнского не мог выносить разговоры неживого существа, и уничтожил робота молотом.
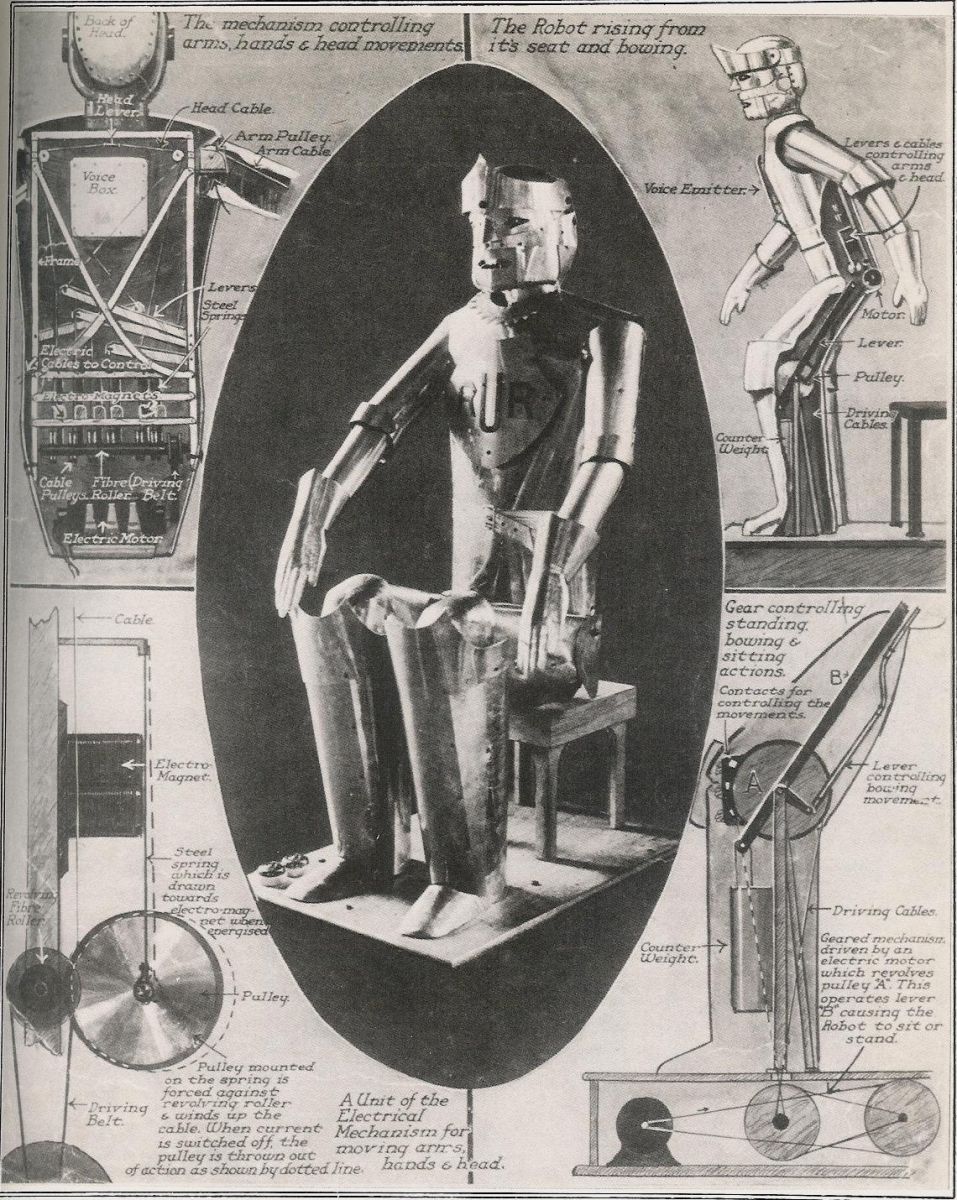
(Человекоподобные роботы из пьесы R.U.R. Карела Чапека в 1921 году)
Само слово «Андроид» было впервые использовано в романе «Будущая Ева». В книге оно обозначало человекоподобного робота Адали, и этим термином писатель Филипп Огюст Матиас Вилье де Лиль-Адам называл именно искусственную женщину, созданную при помощи механических и биологических технологий. Адали говорила через фонограф и была, согласно сюжету, создана Эдисоном.
(Образ первого робота в кино был по сути прототип женскому роботу-андроиду. Фильм «Метрополис», робот Мария (в афише, как Лже-Мария), 1927 год)
В реальности первый Андроид был создан в США, и называли его George. Тони Сейл создал его в 1949 году из металлолома. Повторная активация этого Андроида была проведена в 2010 году во время выставки в Блетчли-парке.
После этого работа над созданием биомеханического робота, похожего на человека, велась достаточно активно, и в последние десятилетия практически все крупные страны представили свои варианты Андроидов. Как ни странно, многие из них имеют явно выраженную принадлежность к женскому полу. В 2010 году в Китае для человекоподобных роботов провели Олимпийские игры, где Андроиды соревновались в разных спортивных дисциплинах. К участию допускались автономные роботы, полуавтономные системы и устройства с дистанционным управлением, и каждый класс соревновался только с себе подобными.
Гиноид. Робот-женщина
Гиноид — человекоподобная робот-женщина. По сути, это тот же Андроид, который относится к женскому полу.
Поскольку изначально робот был бесполым существом, но воспринимался большинством людей, как представитель мужского пола, несмотря на то, что одной из первых была именно Андроид Адали — «женщина». Тогда британская феминистка и писательница Гвинет Джонс предложила новый термин для обозначения именно роботов женского пола, поскольку термин «андроид» изначально был образован от греческого слова «мужчина, человек» — ἀνήρ. Так появилось само понятие гиноида, и на сегодняшний день существуют различные примеры гиноидов не только в творчестве писателей и сценаристов, но и в реальности.

(Андроид-женщина Actroid-DER, разработанный KOKORO Inc на выставке Aichi Japan. Photo by Gnsin)
Пример такого робота-женщины — гиноид «Актроид» DER 01, который был создан в Японии и появился на выставке в 2005 году.
Гиноид София стала первым роботом в мире, который получил официальное гражданство (Саудовская Аравия выдала разрешение на получение роботом гражданства). Сегодня она даже выступает на международных саммитах, развивается и достаточно активно учится у людей.
Хронология создания и развития роботов-андроидов

(Макет робота-андроида с человеческой внешностью)
Хронология по датам создания, появления термина и развития человекоподобных роботов-андроидов.
- Прототип Андроидов, «Железный человек Альберта Кельнского — примерно середина 13 века
- George (США) — 1949
- Repliee R-1 (Япония) — 2005
- Repliee R-2 (Япония) — 2005
- TOPIO (Вьетнам) — 2005
- EveR-1 (Южная Корея) — 2006
- AIKO (Канада) — 2007
- HRP-4C Миим девушка (Китай) — 2009
- Ibn Sina Robot (Арабские Эмираты) — 2009
- Пушкин (Россия) — 2010
- Алиса (Россия) — 2011
- ASIMO (Япония) — 2014
- София (Китай) — 2015
- Einstein Robot (США) — 2017
- Betsy (Россия) — 2019

(Робот C-3PO из «Звездные войны»)
Немало таких роботов и в литературе, а также в кино, и именно в творчестве происходит популяризация самой идеи создания Андроидов в реальной жизни. Те же дроиды из Вселенной Звездых войн получили свое название путем сокращения слова «Андроиды», а в Терминаторе были использованы киборги-андроиды, как в качестве положительных героев, так и в качестве отрицательных.
Источник
Шесть самых современных андроидов, намекающих на наше синтетическое будущее
Гуманоидные роботы устрашающе близко подобрались к нашей реальности. Правильно собранные, с использованием правильных материалов и правильных алгоритмов движения они становятся почти неотличимыми от своих органических копий. Почти. Самые новейшие из них уже способны разговаривать как мы, ходить как мы, а также выражать или по крайней мере имитировать целый спектр разнообразных эмоций. Некоторые из них уже вполне способны поддерживать разговор, а некоторые даже запоминают, когда в последний раз вы с ними говорили и о чем конкретно.

Кажется, еще немного — и они станут незаменимыми помощниками для пожилых, детей и любого другого человека, которому требуется ежедневная помощь по дому. К слову, уже проводятся целые исследования на тему эффективности гуманоидных роботов в поддержке в игровой форме детей с аутизмом.
Однако благодаря таким людям, как Илон Маск, слишком громко озвучивающим свои опасения по поводу искусственного интеллекта, среди общества разгораются жаркие споры о том, насколько сильно мы хотим, чтобы эти гуманоидные роботы походили на нас. Как и Маск, некоторые из нас задаются вопросом о том, как будет выглядеть наше будущее, когда искусственный интеллект обретет совершенную форму человеческого облика. Но такие вопросы совершенно не беспокоят, например, суперреалистичного робота-гуманоида Софию, созданную компанией Hanson Robotics, которая говорит, что «ИИ принесет пользу этому миру».
И все же мы еще очень далеки от продвинутой робототехники. Предстоит проделать еще немало работы перед тем, как мы сможем встретиться лицом к лицу с машиной, и даже не будет подозревать о том, кто же на самом деле перед нами находится. Хорошо это или плохо, но работа продолжается, и не сказать, что инженеры не продвинулись в этом направлении. Ниже будет представлено шесть сверхреалистичных роботов, с которыми робототехники подобрались ближе всего к ожидаемому и одновременно пугающему результату.
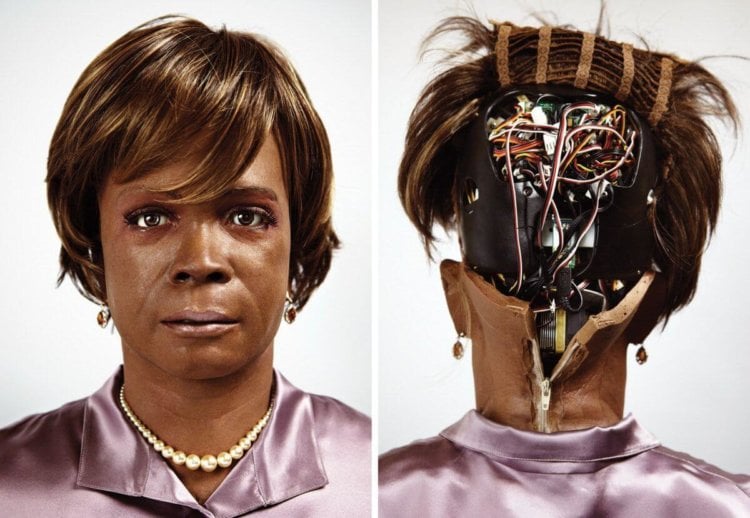
Первый андроид-телеведущий

В 2014 году японские ученые с гордостью представили первого в мире андроида, читающего новости. Железный ведущий с имением Kodomoroid в прямом эфире прочитал сообщение о землетрясении и проведенном ФБР очередном рейде на преступников.
Несмотря на то, что он (или она) в настоящий момент пребывает «на пенсии» в токийском Национальном музее развивающихся наук и инноваций, андроид по-прежнему находится в активном состоянии. Он помогает посетителям и собирает информацию для будущих исследований по вопросам взаимодействия между человекоподобными андроидами и людьми.
BINA48
BINA48 – это весьма смышленый робот, выпущенный в 2010 году компанией Terasem Movement под руководством предпринимателя и автора робота, Матрина Ротблатта. Дизайнер и исследователь робототехники Дэвид Хэнсон создал андроида BINA48 по образу и подобию жены Ротблатта, Бины Аспен Ротблатт.
Газета New York Times даже взяла у робота интервью. Он появлялся в National Geographic и даже путешествовал по миру, появившись в ряде телевизионных шоу. Посмотреть на то, как проходило интервью с BINA48, можно ниже.
Geminoid DK

GeminoidDK представляет собой ультрареалистичного гуманоидного робота, является результатом совместной работы частной японской компании и японского Осакского университета и был создан под руководством Хироси Исигуро, главы университетской Лаборатории интеллектуальной робототехники.
Робот был разработан по образу датского профессора Хенрика Шарфе из Университета Ольборг. Вполне неудивительно, что прототипом послужил человек, чья работа связана с философской сферой. В частности, проблемой, которой занимается профессор, является поиск ответа на вопрос о том, что определяет истину от лжи. Что интересно, андроид позаимствовал не только внешность Шафре. Он также унаследовал его привычки, поведение, манеру речи, а также мимику и язык тела.
Джунко Чихира

Этот сверхреалистичный робот был создан компанией Toshiba и работает полный день в туристическом информационном центре в Токио. Она приветствует посетителей центра и информирует их о текущих мероприятиях. Она знает японский, китайский, английский и немецкий языки и даже может на них петь.
Джунко Чихира была создана в рамках подготовки Японии к Олимпийским играм 2020 года. Планируется, что помогать туристам и обслуживающему персоналу во время наплыва поклонников спорта со всего мира будут не только информационные андроиды. Правительство страны также хочет задействовать автономных дронов и другие автоматизированные машины и сервисы.
Надин

Этот гуманоид был создан Наньянским технологическим университетом Сингапура. Ее имя Надин, и она рада общению практически по любому вопросу, который вы ей зададите. Она способна запоминать вещи, о которых вы говорили с ней ранее, и в следующий раз она обязательно вам о них напомнит.
Надин – отличный пример так называемых «социальных роботов», гуманоидов, способных стать идеальным товарищем для любого, будь то пожилой человек, ребенок или любой, кому требуется особая помощь в форме социального контакта.
София

Возможно, одним из самых современных и самых известных человекоподобных андроидов, показанных общественности, является София. Она множество раз появлялась в различных в телевизионных программах и в частности американском шоу The Tonight Show Starring Jimmy Fallon (Ночное шоу с Джимми Фэллоном). Андроида создала компания Hanson Robotics.
Она способна выражать целый набор различных эмоций с помощью своей имитации мимики и жестов и весьма активно жестикулирует своими руками. Для андроида даже создали ее собственный веб-сайт, где можно найти ее полную биографию, записанную ее голосом.
«Я больше, чем просто технология. Я настоящая электронная девушка. Я бы очень хотела попасть в реальный мир и жить вместе с людьми. Я готова помогать, развлекать, оказывать помощь пожилым и обучать многим интересным вещам детей».
Источник
Ксеноботы: живые нанороботы из клеток лягушки

В далеком 1495 году Леонардо да Винчи создал чертеж живых доспехов. И лишь спустя 425 лет чешский фантаст Карел Чапек впервые использовал слово «робот» в своей пьесе «R.U.R.». Современные роботы намного умнее, сложнее и мобильнее робота да Винчи, но у них есть общие черты. Одной из них является материал, из которого изготавливаются эти удивительные машины. Когда мы говорим о роботах, то чаще всего представляем себе что-то синтетическое, недаром в книгах и кино роботов порой именуют синтетиками.
Однако роботов создавать можно далеко не только из металла, пластика или углеволокна. Ученые из университета Вермонта (США) решили использовать в качестве строительных материалов клетки лягушек. Полученные в результате микроскопические роботы, названные «ксеноботами», способны путешествовать по телу живого организма и выполнять поставленные перед ними задачи. Как именно ученые создали искусственную жизнь, какими талантами могут похвастаться ксеноботы и где можно применить столь необычное изобретение? Об этом мы узнаем из доклада исследовательской группы. Поехали.
Основа исследования
Создать механизм, который под управлением искусственного интеллекта будет выполнять какие-то задачи, не так и сложно в наше время. Не составляет труда и перестроить существующий организм, изменив его структуру, функции или характеристики. Однако создать жизнь с нуля — задача не из простых. Исследователи из университета Вермонта говорят, что синтетические материалы применяются в робототехнике по большей степени из-за простоты их изготовления, внедрения и объединения. Утрировано говоря, металл всегда можно расплавить, перековать или заточить. А вот живые организмы, ткани и клетки, т.е. живые системы демонстрируют устойчивость структуры и функций. Они очень устойчивы к вмешательству извне, нацеленному на изменение их поведения.
При этом живые клетки, особенно эмбриональные, демонстрируют удивительные черты, которыми не могут похвастаться даже самые развитые синтетические роботы. Эмбриональные клетки способны самоорганизовываться, реализуя процессы развития и регенерации тканей в зависимости от ситуации. Манипуляции с этой способностью могут позволить создавать синтетическую морфологию, посредством которой можно реализовать новые формы жизни, как бы громогласно это ни звучало. Тем более процесс самоорганизации клеток можно курировать, тем самым наделяя будущую структуру необходимыми функциями и характеристиками.
На данный момент уже есть несколько методик разработки и создания индивидуальных живых систем. Например, одноклеточные организмы можно модифицировать посредством рефакторированных (преобразованных) геномов, однако это пока невозможно реализовать в многоклеточных системах.
Также можно модифицировать нить клетки путем изменения условий культивирования. Но в таком случае контроль над процессами и над самой структурой и функциями будет минимальный. В противовес этому имеются разработки в области биоинженерии, где исследуются трехмерные каркасы. Такой вариант даст больший контроль. Но неспособность предсказывать поведение произвольной биологической конструкции ограничивает эту методику до сборки биологических машин на базе уже существующих. Другими словами, это будет такая же модификация того, что уже есть, но никак не создание нового живого организма.
Несмотря на все сложности и преграды, способы есть. Одним из них является вычислительный поиск в сопряжении с трехмерной печатью. В отличие от машинного обучения, поиск является эволюционным процессом, позволяющим проектировать физическую структуру машины и ее поведение с нуля. Кроме того, данный метод не привязан к каким-то определенным типам создаваемой структуры или к каким-то конкретным функциям. Один и тот же эволюционный алгоритм можно применять для разработки разных систем: лекарств, метаматериалов и даже автономных машин.
В рассматриваемом нами сегодня исследовании ученые продемонстрировали масштабируемый подход к проектированию живых систем с использованием эволюционного алгоритма.
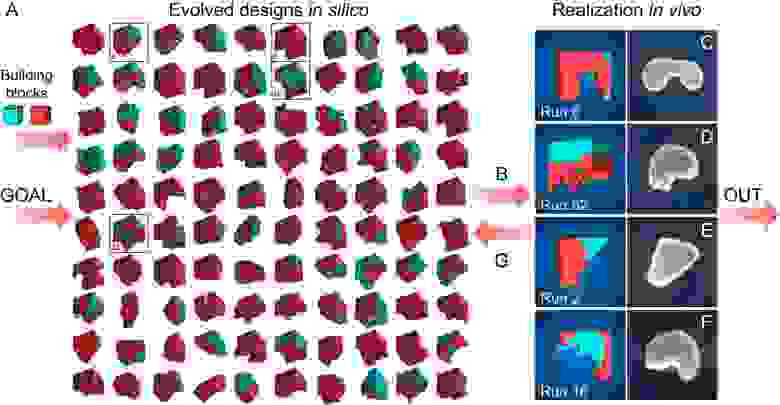
Изображение №1
Новый метод организован в виде линейного конвейера, который принимает в качестве входных данных описание используемых биологических строительных блоков и желаемого поведения, которое должна демонстрировать изготовленная система. Конвейер непрерывно выводит работоспособные живые системы, которые по-разному реализуют заданное поведение. Полученные в результате живые системы являются новыми совокупностями клеток, которые имеют крайне мало общего с уже существующими органами или организмами.
Результаты исследования
Конвейер организован в виде последовательности генераторов и фильтров. Первый генератор — это эволюционный алгоритм, который обнаруживает различные способы объединения биологических строительных блоков для реализации желаемого поведения. Для начала создается популяция случайных вариантов моделей будущей системы. Затем каждая модель воссоздается в виртуальной среде, после чего автоматически присваивается оценка производительности. Менее производительные модели удаляются и перезаписываются случайно измененными копиями более производительных моделей. Повторение этого процесса приводит к образованию популяций разнообразных и не повторяющихся моделей.
Видео-презентация процесс проектирования реконфигурируемых организмов.
Поскольку между моделируемыми и целевыми физическими средами, вероятно, будет много различий, эффективные модели пропускаются через фильтр устойчивости (надежности), позволяющий проходить только тем, которые поддерживают желаемое поведение несмотря на шум (изменения в среде).
Выжившие устойчивые к шуму модели затем пропускаются через фильтр сборки, который удаляет модели, не подходящие для текущего метода сборки или не смогут масштабироваться до более сложных задач в будущем. Технологичность изготовления зависит от минимального размера вогнутости, которая будет сохраняться в скоплениях развивающихся стволовых клеток, имеющих тенденцию закрывать небольшие промежутки в их общей геометрии. Масштабируемость модели зависит от ее доли пассивной ткани, которая обеспечивает пространство для будущих систем органов или полезных нагрузок (т.е. пространство для удержания переносимого вещества, например, лекарства).

Xenopus laevis
Модели, которые успешно прошли через фильтр сборки, затем формируются из живых тканей. Плюрипотентные* стволовые клетки сначала собирают из эмбрионов Xenopus laevis (гладкая шпорцевая лягушка) в стадии бластулы, потом диссоциируют и объединяют для достижения желаемого количества клеток.
Плюрипотентные клетки* способны дифференцироваться (трансформироваться) во все типы клеток, кроме клеток внезародышевых органов.
После инкубационного периода агрегированную ткань вручную формируют путем вычитания с использованием комбинации щипцов для микрохирургии и прижигательного электрода с иглой в 13 мкм.
Помимо этого производится наслоение сократительной ткани на организм путем внедрения клеток-предшественников сердца лягушки, которые естественным образом развиваются в кардиомиоциты (сердечная мышца). Эти клетки будут создавать сократительные волны в определенных местах созданного организма.
Результатом всех этих манипуляций стала трехмерная живая репрезентация модели, обладающая способностью самостоятельно передвигаться по водной среде в течение нескольких дней и даже недель без дополнительных питательных веществ.
Видео-презентация процесс создания реконфигурируемых организмов.
Полученные организмы в дальнейшем внедряют в реальную физическую среду для проведения наблюдений за их поведением.
Далее ученые сравнивали наблюдения с результатами моделирования для выявления факта перехода поведения от «синтетик» до «органик».
Важным аспектом методики является продолжение работы эволюционного алгоритма даже после внедрения в среду готовых организмов. Некоторые из них, несмотря на свою полноценность на стадии разработки, могут проявлять не совсем то поведение, что ожидалось. Такие модели организмов удаляются из алгоритма, что приводит к созданию в следующий раз более стабильных и соответствующих требованиям среды организмов.
Таким образом, было осуществлено 4 захода конвейера. Результатом этого стали 4 типа организмов, демонстрирующие следующие особенности: локомоция, манипулирование объектами, перенос объектов и коллективное поведение. О каждой из особенностей теперь поговорим подробнее.
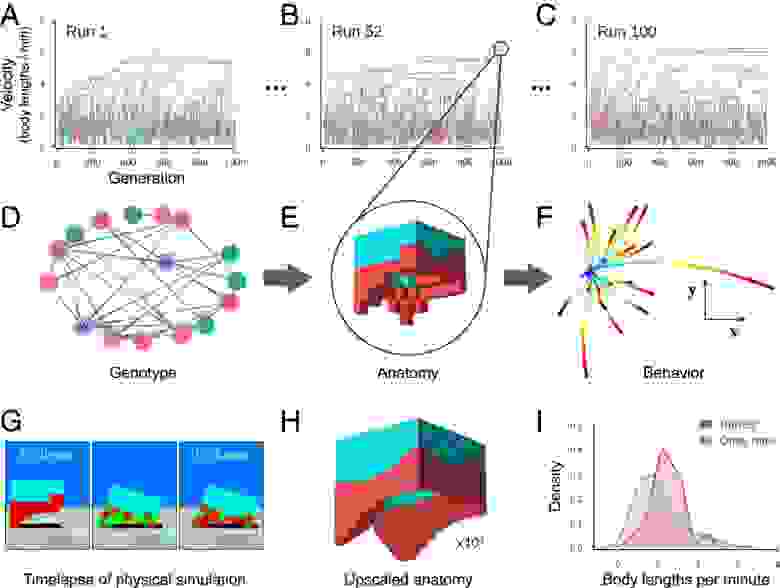
Изображение №2
Чтобы получить разнообразную совокупность моделей, было проведено 100 независимых испытаний эволюционного алгоритма (2А—2С), каждое из которых начиналось с разного набора начальных случайных моделей. Во время каждого испытания были отобраны модели, основанные на чистом смещении (перемещении), достигнутом в течение 10-секундного периода (с рандомизированным, фазово-модулированным сокращением, циклическом при 2 Гц). В процессе каждого испытания применялись дополнительные параметры отбора в виде стимуляции конкуренции внутри и между уникальными генетическими линиями, что привело к формированию уникальной экологической динамики. В конце каждого испытания наиболее подходящие модели были извлечены (1А) и пропущены через фильтры устойчивости и сборки. В процессе этой фильтрации отбирались те модели, что сохраняли быструю локомоцию при масштабировании и наращивании (изображение №3).
Изображение №3
Стоит отметить, что реснички (цилии, тонкие волоски на поверхности клеток) не моделировались в процессе проектирования и подавлялись во время практических тестов посредством эмбриональной микроинъекции мРНК, транскрибирующей внутриклеточный домен Notch. Таким образом все движения организмов осуществлялись исключительно посредством сокращения сердечной мышечной ткани.
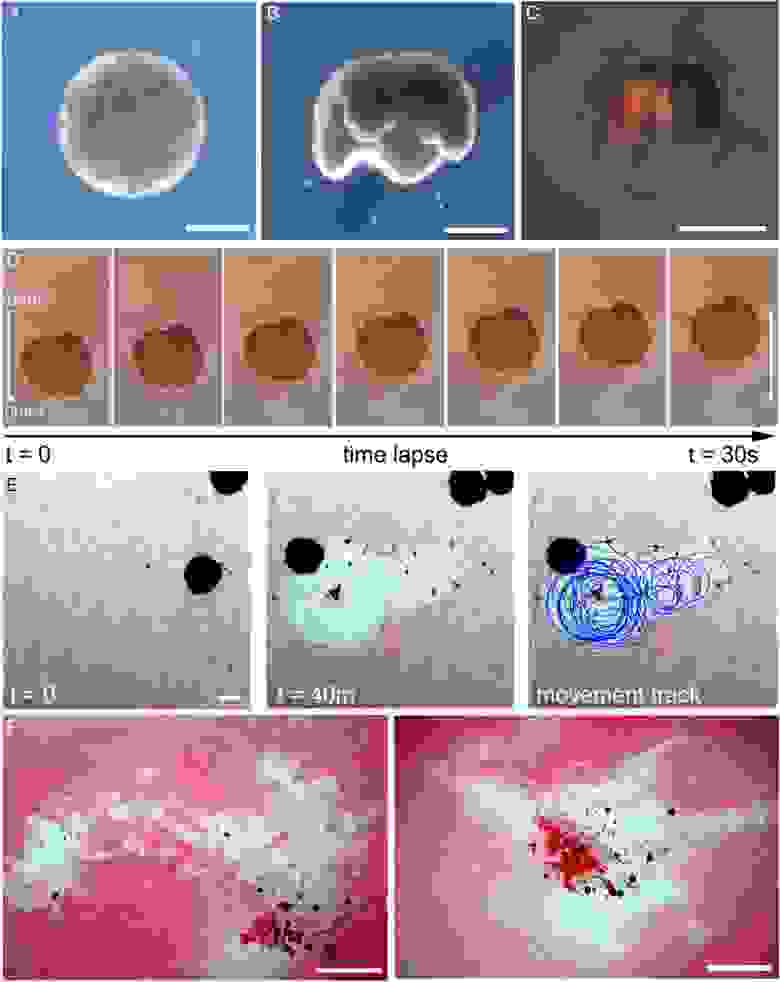
Проводилось сравнение траекторий смоделированных и реализованных децилированных (без цилии) организмов в двух вариантах ориентации: вертикальная и инвертированная, т.е. перевернутая на 180° относительно поперечной плоскости. Наблюдения показали, что как минимум один из вариантов моделей организма успешно реализовывал заданное поведение в вертикальной ориентации, но не в инвертированной (изображение №4).

Изображение №4
Направление движения организмов с вертикальной ориентацией совпадало с направлением модели при случайных возмущениях. Это говорит о том, что успешное перемещение в пространстве не является случайным, а является результатом самого проектирования модели организма.
Второй особенностью является манипулирование объектами. Когда в среде пребывания тестируемых организмов находились твердые частички, первые начинали самопроизвольно объединяться с ними, как в моделировании, так и на практике (3F).
Данное поведение сложно назвать структурированным, так как не были заданы нужные параметры задачи. Более точно реализовать это можно посредством добавления более точных данных: например, указывать область, которую нужно очистить от частичек или указать определенный тип частичек, которые необходимо удалить, при этом игнорируя все другие. Второй вариант поведения был реализован, но пока что на примитивном уровне.
На следующем этапе проверялись организмы, проявляющие способность транспортировать объекты. Некоторые из организмов были спроектированы таким образом, чтобы уменьшить гидродинамическое сопротивление посредством отверстия в центре их поперечной плоскости. Однако в данном участке организма не было сократительных тканей.
Данное отверстие в процессе последующих циклов эволюционного алгоритма может быть преобразовано в своего рода мешочки для переноса объектов, что может быть использовано для локализованной доставки лекарственных веществ.
Еще одна особенность — коллективное поведение. Во время практической реализации наблюдалось столкновение двух организмов, приводящее к формированию временной механической связи. Эти два организма начинают вращаться вокруг друг друга, а спустя несколько оборотов опять разъединяются вдоль тангенциальных траекторий. Подобное поведение будет куда более отчетливым в случае, если не подавлять развитие ресничек, так как они приводят к «запутыванию» двух организмов между собой, т.е. их связь становится значительно продолжительнее.
Для более подробного ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
Данное исследование несложно назвать уникальным, учитывая его результаты. Ученые взяли клетки лягушки и создали из них новые многоклеточные организмы, выполняющие заданные функции в той или иной степени успешности. Даже авторы этого труда понимают, что многих пугает перспектива автономных, в какой-то степени думающих, роботов, что уж говорить о новых формах жизни. Однако, по их мнению, данное исследование позволяет лучше понять саму жизнь как явление. К тому же разработанные ксеноботы могут послужить в медицине, став живыми нано-хирургами, удаляющими вредоносные и патогенные клетки из организма пациента, или нано-курьерами лекарств, доставляющими их прямиком туда, где они будут наиболее эффективно бороться с заболеванием.
Жизнь во всех ее формах и проявлениях безупречна, несмотря на все недостатки. Каждое живое существо эволюционировало, чтобы приспособится к меняющимся условиям обитания. Современная наука способна создавать жизнь, но лишь в рамках изменения уже существующих организмов. А вот создать с нуля нечто новое — совсем другая задача, более сложная, более амбициозная. Примеры искусственно созданных организмов есть, но они не могут сравниться с теми, что описывают в своих произведениях фантасты. Несмотря на это, ученые со всего мира не прекращают свои исследования, надеясь создать новую форму жизни. Насколько опасно играть с природой, пока сложно сказать. Однако если верить писателям-фантастам, то подобные открытия до добра не доведут. Тем не менее, произведения фантастической литературы, хоть во многом и предсказывают будущее общества в целом и науки в частности, являются лишь плодом фантазии автора. Как именно будут использованы разрабатываемые ныне технологии, в том числе и ксеноботы, зависит исключительно от нас самих.
Благодарю за внимание, оставайтесь любопытствующими и отличных всем выходных, ребята! 🙂
Немного рекламы 🙂
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Equinix Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
Источник



