- Робот на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04
- Робот на Ардуино и машинка на Bluetooth своими руками
- Робот на ардуино своими руками
- Контроллер Ардуино
- Конструкция, шасси и двигатели робота на Ардуино
- Драйвер двигателей
- Красивый корпус
- Питание робота
- Где купить платформу и запчасти
- Робомобиль на базе Arduino Mega 2560 с Bluetooth управлением и автономным движением с объездом препятствий
- Обзор motor shield l293d
- Технические параметры
- Общие сведения о L293D
- Подключение к Arduino двигателя постоянного тока с помощью L293D
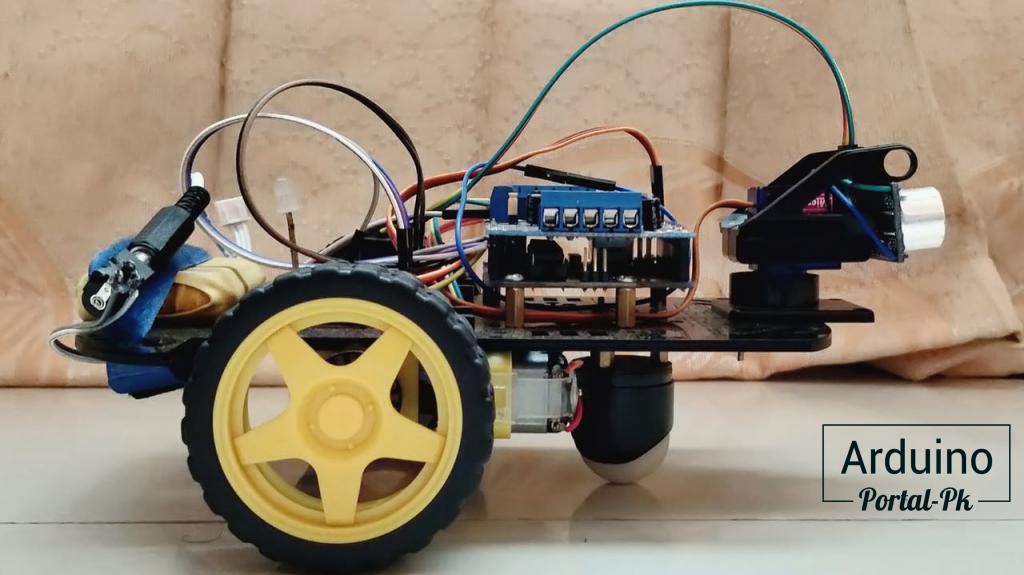
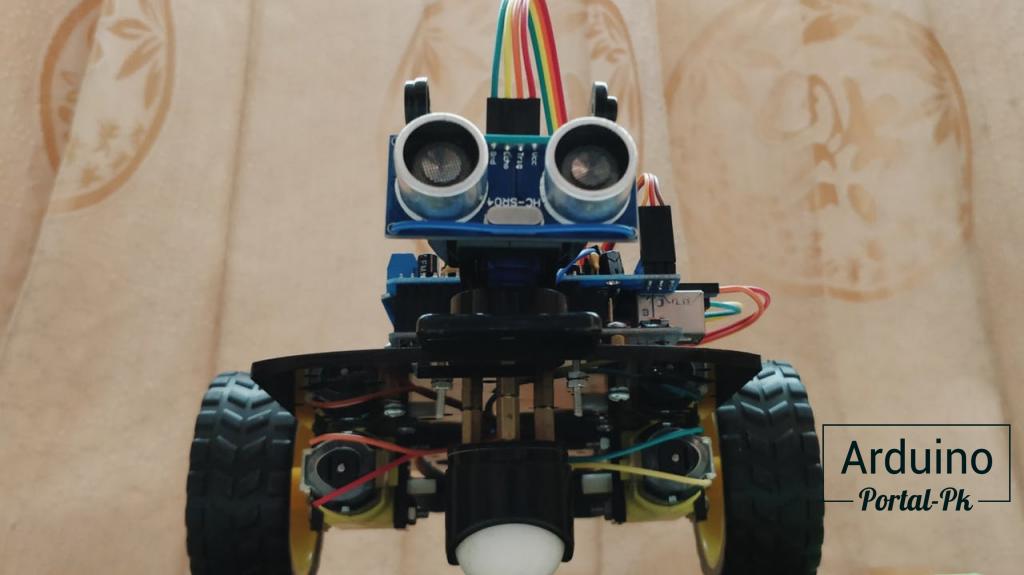
Робот на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04

Устранение препятствий – это одно из существенных центральных проблем при разработке мобильных роботов. В этом документе представлена конструкция умной машины на базе ардуина , которая самостоятельно может определять препятствия и объезжать их , принимая разумные решения. Это роботизированная машинка собирается на мотор шилде (Adafruit Motor Shield), поэтому для ее сборки не нужно ничего паять. Для сервопривода, который вращает сенсор (глаза робота), предусмотрен также вывод.
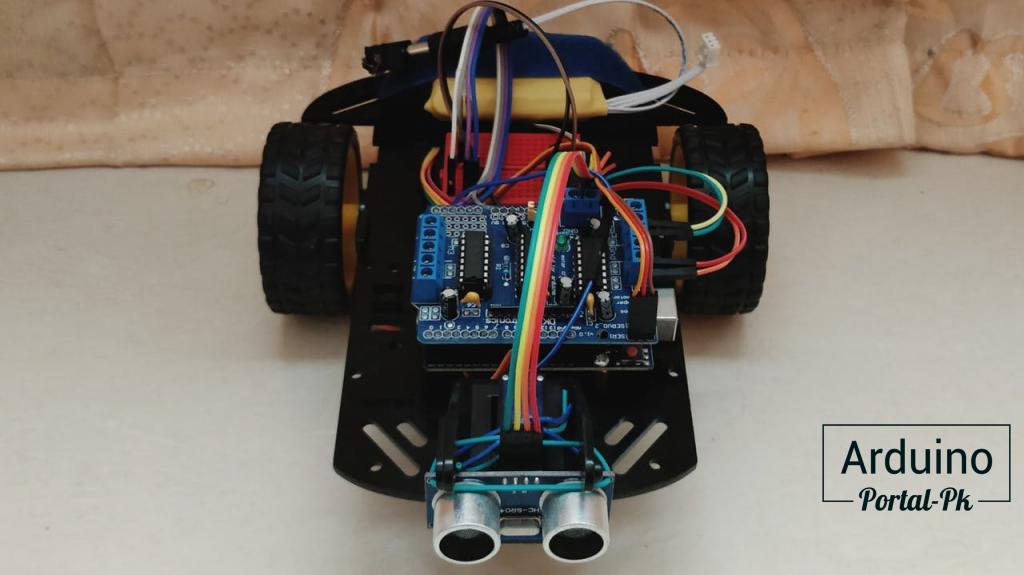
Для обеспечения необходимых автономных функций использовалось программное обеспечение, написанном на языке Arduino. Интеграция ультразвукового датчика расстояния HC-SR04 , установленного на серводвигателе, позволила этому роботу обнаруживать окружающие препятствия.
Будучи полностью автономным, робот способен перемещаться в незнакомой обстановке без каких-либо столкновений. Этот разработанный метод может быть использован для дальнейших улучшений, чтобы повысить адаптивность обнаружения препятствий в различных ситуациях.
Автономный робот — это тот, который имеет какие-то встроенные функции искусственного интеллекта.
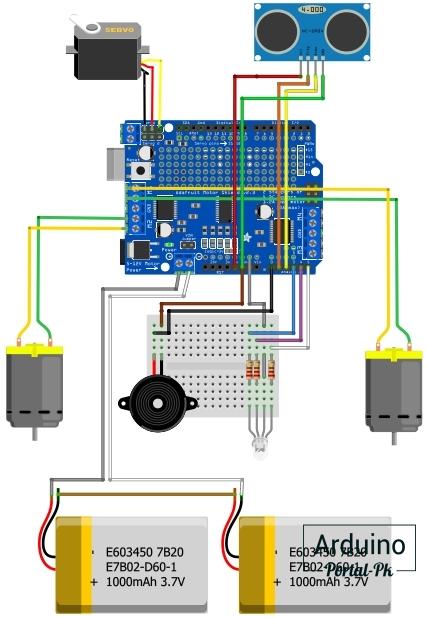
Для создания робота на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04 понадобиться:
Ultrasonic Sensor — HC-SR04 (Generic)
RGB Diffused Common Cathode
Автор рассказывает из каких компонентов сделана робот и предоставляет схему подключения.
Так же необходимо наличие 2 библиотек в среде Arduino IDE:
Скачать код для машины на на Arduino, Motor Shield L293D и ультразвуковом датчике HC-SR04.
Более подробная информация на странице проекта.
Таким образом, разработанный робот полностью автономен и способен выполнять свою работу без какого-либо вмешательства человека. После передачи представленного кода этот робот может перемещаться, избегая всех препятствий в неизвестной среде со значительной точностью.
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока. И до встречи в следующем проекте.
Понравилась статья? Поделитесь ею с друзьями:
Источник
Робот на Ардуино и машинка на Bluetooth своими руками
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
 Робот машина на Ардуино
Робот машина на Ардуино
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуино
Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на Ардуино
Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Источник
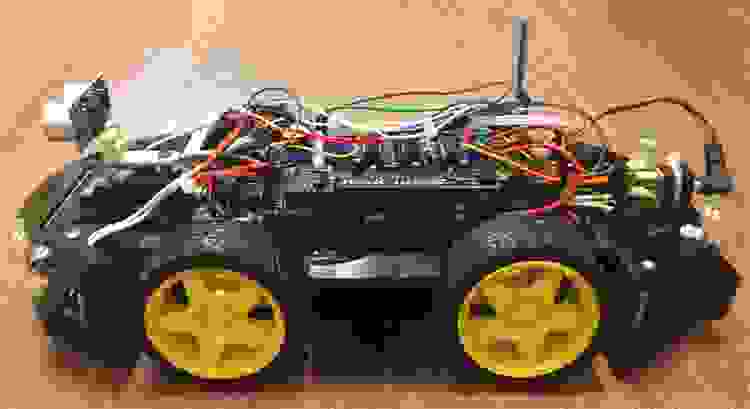
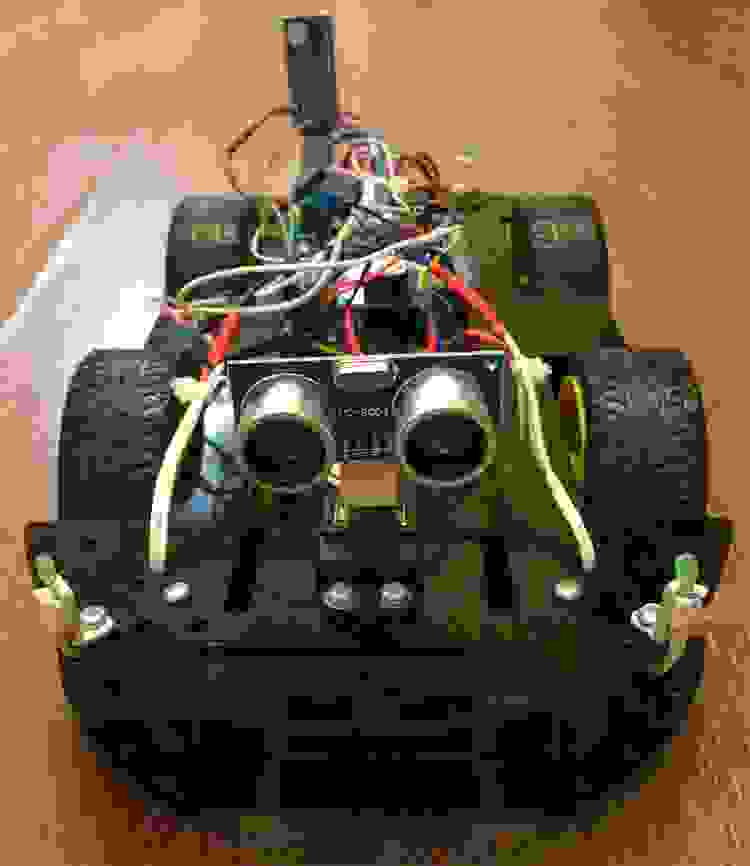
Робомобиль на базе Arduino Mega 2560 с Bluetooth управлением и автономным движением с объездом препятствий
Представляю свой проект робомобиля на Arduino. На просторах интернета есть масса подобных статей, наткнувшись на одну из них решил реализовать увиденное со своими изменениями в конструкцию и функционал. Реализованы следующие возможности: управление робомобилем по Bluetooth со смартфона; автономное движение робомобиля с объездом препятствий.
Для реализации нам понадобится:
Комплект: рама, моторы, колёса, крепления (Car Chassis Kit for Arduino — фото)
Arduino Mega 2560
Motor Control Shield for Arduino L293D
Сервопривод MG995
Ультразвуковой дальномер HC-SR04
Bluetooth модуль HC-05 JY-MCU
Active High Level Buzzer Alarm / Speaker Buzzer Module
Диоды для фар
Соединительные провода
Держатели для дальномера и Bluetooth модуля (делал сам)
Блок питания (я взял от кассового аппарата)
Приложение на Android для управления робомобилем по Bluetooth Arduino Bluetooth RC Car (фото, при подключении к Bluetooth модулю пин-код по умолчанию «1234»)
Подключение комплектующих
| Моторы | Motor Shield L293D | Фары | Arduino Mega 2560 |
| П.Л. | М3 | П.Л. | «-» на GND, «+» на Pin 22 |
| П.П. | М4 | П.П. | «-» на GND, «+» на Pin 24 |
| З.Л. | М1 | З.Л. | «-» на GND, «+» на Pin 34 |
| З.П. | М2 | З.П. | «-» на GND, «+» на Pin 35 |
| Дальномер HC-SR04 | Arduino Mega 2560 | Bluetooth HC-05 | Arduino Mega 2560 | Buzzer | Arduino Mega 2560 |
| Vcc | 5V | VCC | 5V | SIG | Pin A9 |
| Trig | Pin 31 | GND | GND | VCC | Pin A8 |
| Echo | Pin 30 | TXD | Pin 50 | GND | GND |
| Gnd | GND | RXD | Pin 51 |
| Сервопривод MG995 | Motor Shield L293D |
| тройная клема | SERVO_2 (центральный провод «+» откусываем и запитываем напрямую от «+» Motor Shield — фото; при управлении по Bluetooth — клему снимайте, чтобы серва не дёргалась) |
Процесс сборки
К моторам припаиваем провода, обратите внимание, на всех нижних контактах у меня чёрные провода, на верхних — красные, не перепутайте полярность при подключении к Motor Shield.


Крепим сервопривод к верхней части рамы, моторы к нижней, собираем раму, ставим колёса. Устанавливаем Motor Shield сверху Arduino Mega и крепим на раму, подключаем всё по схеме выше, заливаем соответствующий скетч (в конце статьи) — наслаждаемся.
Управление по Bluetooth — устанавливаете приложение на свой смартфон, запускаете, подключаетесь (Connect) к Bluetooth модулю (при необходимости вводите пин-код); управлять можно классическим способом по стрелкам (Buttons), а так же в меню программы можно выбрать Accelerometer и управлять с помощью наклонов смартфона.
Автономное движение с объездом препятствий — алгоритм следующий: дальномер измеряет расстояние впереди, если оно > 30 см (в скетче параметр const int vmindistance), то продолжаем двигаться вперед, если 30 см, то проверяем какому углу поворота сервопривода оно соответствует и в зависимости от этого поворачиваем влево или вправо.
Источник
Обзор motor shield l293d
Автор: Сергей · Опубликовано 22.05.2020 · Обновлено 04.08.2020

Если задумались спроектировать робота, первым делом необходимо научится управлять различными двигателями, это может быть и двигатель постоянного тока или сервопривод. Один из самых простых и недорогих способов это воспользоваться Motor Shield на базе L293D, который можно легко установить на плату Arduino UNO.
Технические параметры
► Напряжение питания двигателей: 5 — 36 В
► Напряжение питания платы: 5 В
► Допустимый ток нагрузки: 600 мА на канал
► Максимальный (пиковый) ток нагрузки: 1,2 А на канал
► Размер платы: 70х54х20 мм
Общие сведения о L293D
Motor shield построен на микросхеме L293D, состоящая из двух H-мост (H-Bridge), с помощью которых можно управлять двумя постоянными двигателями или одним шаговым двигателем. Каждый канал рассчитан на 0.6 А с пиком 1.2 А. Так как на shield установлено две микросхемы L293D, можно управлять сразу четырьмя двигателями постоянного тока, это позволяет использовать данный shield в разработке робот платформ. Так же, на shield установлена микросхема 74HC595, которая расширяет 4 цифровых контакта Arduino до 8 управляющих контактов двух микросхем L293D.


Питание Motor shield L293D:
► Общий источник питания для Arduino и двигателей (максимальное напряжение 12 В) — можно использовать один источник питания, используется разъем DC на Arduino UNO или 2-х контактный разъем на shield «EXT_PWR«, так же необходимо установить перемычку «PWR«.
► Раздельный источник питания — рекомендуется отдельно питать Arduino и shield, для этого Arduino подключаем к USB, а двигатели подключаем к источнику постоянного тока, используя разъем » EXT_PWR». Необходимо убрать перемычку перемычку «PWR«.
Внимание! Нельзя подавать питание на «EXT_PWR» выше 12 В при установленной перемычке «PWR».
Выходные контакты двух микросхем L293D выведены по бокам shield с помощью 5-ти контактных винтовых клемм, а именно М1 , М2 , М3 и М4. К этим контактам подключается четыре двигателя постоянного тока и два шаговых двигателя.
Так же, на shield выведен два 3-х контактных разъема, которым можно подключить два сервопривода.
Неиспользуемые контакты:
Цифровые контакты D2 и D13 и аналоговые контакты A0-A5 не используются.

Подключение к Arduino двигателя постоянного тока с помощью L293D
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Блок питания 12В, 2А x 1 шт.
► Кабель USB 2.0 A-B x 1 шт.
► Двигатель постоянного тока x 21шт.
► Motor shield L293D
Подключение:
Устанавливаем shield сверху Arduino, далее подключаем источник питания к клеммам «EXT_PWR«, в примере используется источник питания на 9 В. Теперь подключаем двигатели к клеммам M1, M2, M3 или M4. В примере подключаем к М4.

Установка библиотеки:
Для удобной работы с Motor shield L293D необходимо установить библиотеку «AFMotor.h». Заходим в Arduino IDE, открываем вкладку «Скетч» -> «Подключить библиотеку» и нажимает «Управлять библиотеками…«

Откроется новое окно «Менеджер библиотек«, в окне поиска вводим «Adafruit Motor Shield» и устанавливаем библиотеку.

Программа:
В данном скетче показано, как управлять скоростью и направлением движении двигателями постоянного тока.
Источник



