- Подключение Motor Shield L293D к Arduino
- Как подключить мотор шилд к Ардуино
- Motor Shield L293D: схема, характеристики
- Характеристики Мотор Шилд L293D
- Как подключить Motor Shield к Ардуино
- Скетч для Motor Shield L293D Ардуино и моторов
- Пояснения к коду:
- Скетч для подключение серво и шаговых двигателей
- #33. Motor shield l293d подключение. Пример кода для Arduino
- Технические параметры Motor shield l293d.
- Общие сведения о Motor shield L293D.
- Питание Motor shield L293D:
- Контакты, которые не используются Motor shield L293D:
- Подключение к Motor shield L293D двигателя постоянного тока.
- Схема подключения двигателя постоянного тока к Motor shield.
- Установка библиотеки «AFMotor.h»
- Скетч управления двигателем постоянного тока с помощью Motor shield L293D.
- Подключение сервопривода к Motor shield L293D.
- Схема подключения сервопривода SG90S к Motor shield.
- Скетч управления сервопривода SG90S.
- Подключение к Motor shield L293D шагового двигателя NEMO17.
- Схема подключения шагового двигателя Nemo17 к Motor shield L293D.
- Скетч управления шаговым двигателем Nemo17 с помощью Motor shield L293D.
Подключение Motor Shield L293D к Arduino
На повестке дня – подключение L293D к Arduino, знакомство с техническими характеристиками модуля, его практическим применением и простейшими схемами сборки. Для начала разъясним, для чего предназначены подобные устройства. Они служат спусковым, так называемым соединительным звеном между платами Ардуино и непосредственно двигателями постоянного тока.
Если вы всерьез занимаетесь электроникой, робототехникой, созданием различных автоматизированных проектов и «умных систем», Motor Shield поможет вам эффективно реализовать поставленные конструкторские задачи. С данным драйвером вы легко подключите дополнительное оборудование: сервоприводы, шаговые биполярные ∕ коллекторные DC двигатели, моторы и прочее.
В продолжение темы рассмотрим параметры платы:
- 2 H-моста (для управления сразу двумя двигателями) + возможность подключения 2-х сервоприводов (5 Вольт), 4-х моторов, 2-х шаговых двигателей (6 — 12 Вольт);
- напряжение: 4,5-36 V;
- max (пиковый) ток: до 1,2 А;
- выходной (рабочий) ток: 600 мА;
- диапазон рабочих температур: -40°C . 150°C;
- количество выходов: 4.
Кроме того, модуль совместим с такими популярными микроконтроллерами как Arduino Mega, Nano и Uno (в дальнейшем мы рассмотрим именно последний вариант), а также Diecimila, Duemilanove.
Распиновка выводов показана на скриншоте: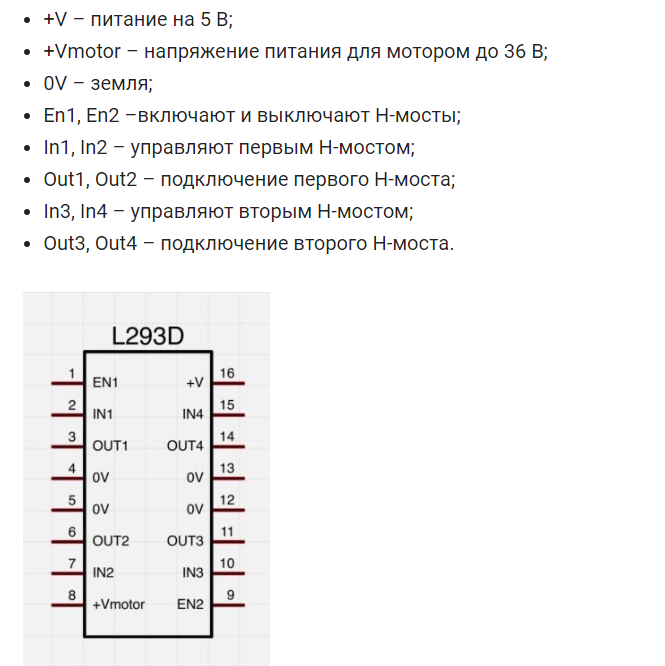
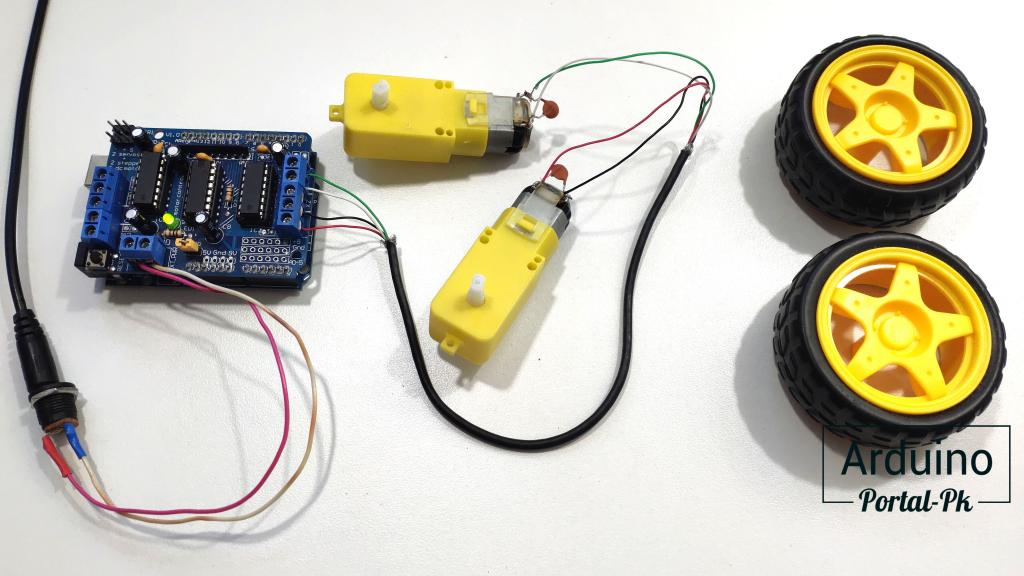
Принципиальная схема подключения одного двигателя показана ниже: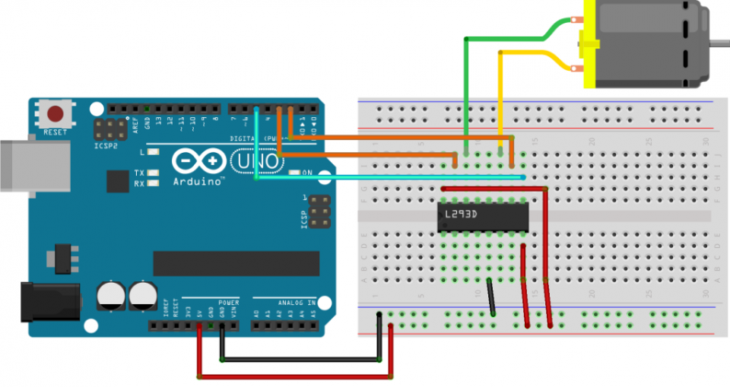
Для ее реализации мы использовали такие аппаратные компоненты:
- Управляющая платформа Аруино Uno
- Модуль расширения L293D
- Макетная (монтажная) плата
- 1 двигатель
- Соединительные провода
Для полноценной работы и тестирования сборки необходима специализированная библиотека — AFMotor.h. Ее следует инсталлировать в папку «libraries» (среда программирования Arduino IDE). Не забывайте перезагрузить ПО!
https://github.com/adafruit/Adafruit-Motor-Shield-library
В сети Интернет можно найти большое количество прошивок. Пример одного из подобных скетчей (тестируем один мотор):
Проверяем два коллекторных электромотора. Сборка, соответственно, меняется:
Программные коды прописываем так:
При желании можно еще больше усложнить и модернизировать схему, а также поработать с другими опциями — увеличить скорость до максимального уровня, затем полностью снизить вплоть до остановки (сначала одного, потом второго двигателя).
К слову, при функционировании моторов среда Ардуино может частенько перезапускаться. Не стоит этого бояться — перезагрузка связана с тем, что двигателям необходимы более «высокие» токи при моменте старта и торможении.
Источник
Как подключить мотор шилд к Ардуино

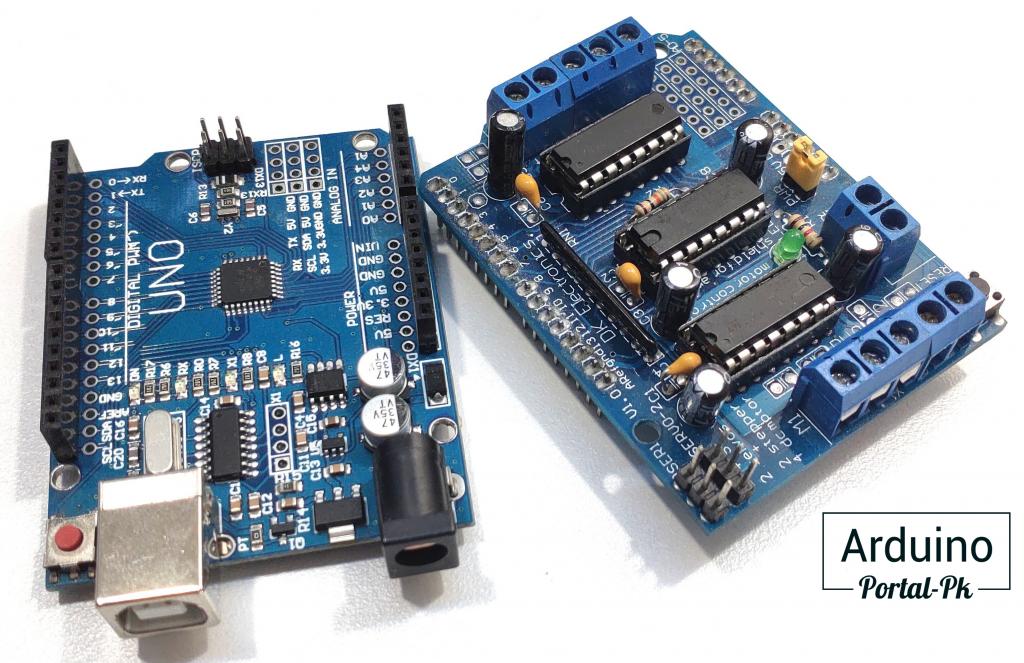
Сегодня мы разберем весьма полезное расширение для платы Arduino UNO — Motor Control Shield L293D, рассмотрим схему подключения к данному шилду сервомоторов, шаговых двигателей и моторов постоянного тока. Также вы можете ознакомиться с командами, используемых в библиотеке AFMotor.h, и попробовать различные скетчи для управления шаговыми двигателями и моторами постоянного тока на Ардуино.
Motor Shield L293D: схема, характеристики
Микроконтроллер Ардуино позволяет любому начинающему радиолюбителю изготавливать сложные автоматизированные устройства и проекты. Использование Motor Shield может стать полезным дополнением во в многих проектах на Arduino, так как позволяет подключить сразу 2 сервопривода, 2 шаговых двигателя и до 4 двигателей постоянного тока (с реверсом направления вращения ротора).
Схема и подключение Motor Control Shield for Arduino
Характеристики Мотор Шилд L293D
— для работы нужна библиотека AFMotor.h (скачать библиотеку);
— возможность подключения 2-х сервоприводов на 5 Вольт;
— возможность подключения 2-х шаговых двигателей от 6 до 12 Вольт;
— подключение до 4-х моторов с возможностью реверса направления вращения;
— контакты для подключения внешнего питания для двигателей;
— Motor Shield for Arduino совместим с платами Uno и Mega.
При подключении серводвигателей и моторов к Ардуино используются различные порты, к которым нельзя подключать другую периферию. Так, для серво используются цифровые порты 9 и 10, для шаговых двигателей и моторов используются порты с 3 по 8 и 12. Если вы желаете еще что-то подключить, то используйте 0 и 1 порт, 2 и 13, а также аналоговые входы (порты A0-A5 можно использовать как цифровые выходы).
Как подключить Motor Shield к Ардуино
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- Motor Shield L293D;
- сервомотор;
- двигатели постоянного тока;
- шаговый двигатель;
- провода «папа-мама», «папа-папа».
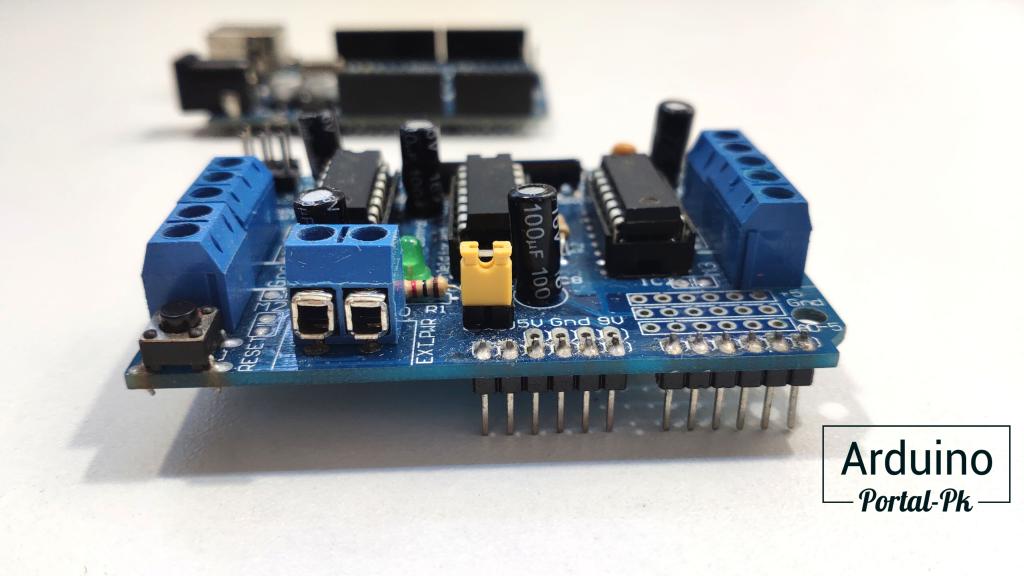
К Ардуино шилд подключается очень просто — он устанавливается на плату UNO прямо сверху. Обратите внимание, что без подключения внешнего источника питания к Motor Shield, логика и двигатели будут работать от 5 Вольт, что не всегда бывает достаточно. Поэтому скорость вращения моторов постоянного тока при подключении платы Ардуино от компьютера и блока питания будет значительно отличаться.
Мотор Шилд Ардуино схема подключения
Обратите внимание, что даже если вы задали одинаковую скорость вращения в скетче, моторы в реальности могут вращаться с разной скоростью — на это оказывает влияние скорость самого двигателя, качество изготовления редуктора и колес. После подключения двигателей, как на схеме выше, загрузите следующий скетч (скачать библиотеку AFMotor и скетч можно здесь) для тестирования работы шилда:
Скетч для Motor Shield L293D Ардуино и моторов
Пояснения к коду:
- Для каждого мотора следует присваивать свое имя AF_DCMotor motor1(1) ;
- Максимальная скорость вращения motor1.setSpeed(255) равна 255;
- Без команды motor1.run(RELEASE) мотор продолжит вращаться.
Скетч для подключение серво и шаговых двигателей
Для управления сервоприводами используется стандартная библиотека Servo.h, сами сервоприводы подключаются к цифровым выходам 9 и 10 через штырьки на краю платы. К шилду можно подключить только два сервопривода и два шаговых двигателя. Первый шаговый двигатель подключается к клеммам M1 и M2, а второй к клеммам M3 и M4. Схема подключения двигателей к Motor Shield L293D изображена далее.
Подключение шаговых двигателей к Motor Shield L293D
После подключения Stepper Motor к шилду загрузите в плату следующий скетч:
Источник
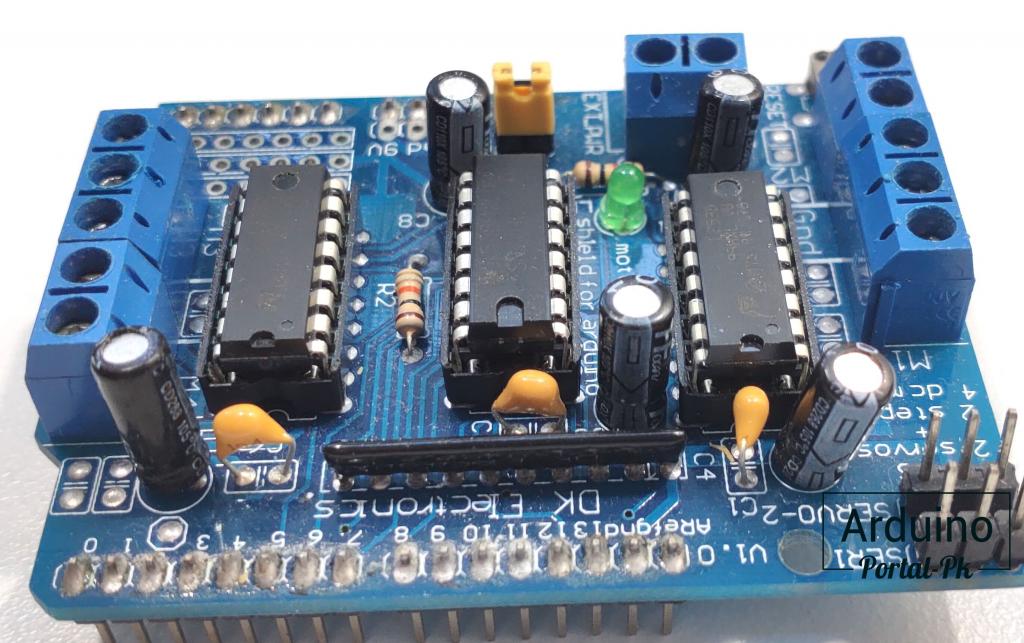
#33. Motor shield l293d подключение. Пример кода для Arduino

Робототехника с каждым годом становиться все популярнее. И поэтому количество электроники с помощью которой можно реализовать роботизированную модель достаточно много. А если у вас нет опыта работы с электроникой, вам отлично подойдёт Motor shield на базе драйвера l293d. Шилд устанавливается на плату Arduino UNO.
На shield выведены контакты для подключения двигателей постоянного тока, шаговых двигателей и сервоприводов. Я уже делал проект с использованием данного Motor shield. У вас, наверное, возник вопрос. Если шилд такой простой, почему у меня мало Arduino проектов с его использование? Это связанно со сложностью расширения функционала проекта при использовании Motor shield l293d. Но обо всём по порядку.
Технические параметры Motor shield l293d.
- Напряжение питания двигателей: 5 — 36 В
- Напряжение питания платы: 5 В
- Допустимый ток нагрузки: 600 мА на канал
- Максимальный (пиковый) ток нагрузки: 1,2 А на канал
- Размер платы: 70х54х20 мм
Общие сведения о Motor shield L293D.
Motor shield построен на драйвере L293D, состоящим из двух H-мост (H-Bridge), с помощью которых можно управлять двумя постоянными двигателями или одним шаговым двигателем. Каждый канал рассчитан на 0.6 А с пиком 1.2 А. Так как на Motor shield установлено две микросхемы L293D, можно управлять сразу четырьмя двигателями постоянного тока, это позволяет использовать данный shield в разработке робот платформ. Так же, на shield установлен сдвиговый регистр 74HC595, который расширяет 4 цифровых контакта Arduino до 8 управляющих контактов двух микросхем L293D. Познакомиться подробнее со сдвиговым регистром 74HC595 можно в уроке: Урок 2 — Подключаем сдвиговый регистр 74НС595 к Arduino. «Бегущие» огни.
Питание Motor shield L293D:
- Общий источник питания для Arduino и двигателей (максимальное напряжение 12 В) — можно использовать один источник питания, используется разъем DC на Arduino UNO или 2-х контактный разъем на Motor shield «EXT_PWR», так же необходимо установить перемычку «PWR».
- Раздельный источник питания — рекомендуется отдельно питать Arduino и shield, для этого Arduino подключаем к USB, а двигатели подключаем к источнику постоянного тока, используя разъем «EXT_PWR». Необходимо убрать перемычку «PWR».
Внимание! Нельзя подавать питание на «EXT_PWR» выше 12 В, при установленной перемычке «PWR».
Выходные контакты двух микросхем L293D выведены по бокам shield с помощью 5-ти контактных винтовых клемм, а именно М1 , М2 , М3 и М4. К этим контактам подключается четыре двигателя постоянного тока и два шаговых двигателя.
Так же, на shield выведено два 3-х контактных разъема, к которым можно подключить два сервопривода.
Контакты, которые не используются Motor shield L293D:
Так как шилд устанавливается на Arduino UNO, есть контакты, которые не используются Motor shield и к ним можно подключить дополнительные компоненты. Это цифровые контакты D2 и D13 и аналоговые контакты A0-A5. Кроме этого на шилде можно распаять пины A0-A5 и подключаться к ним прямо на shield.
Подключение к Motor shield L293D двигателя постоянного тока.
Для этого нам понадобятся следующие комплектующие:
Схема подключения двигателя постоянного тока к Motor shield.
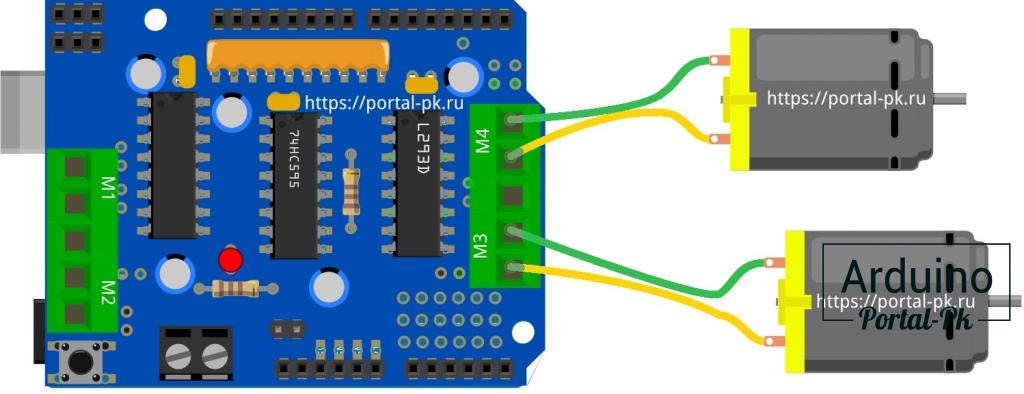
Устанавливаем shield сверху Arduino, далее подключаем источник питания к клеммам «EXT_PWR», в примере используется источник питания на 12 В. Теперь подключаем двигатели к клеммам M1, M2, M3 или M4. В примере подключаем 2 двигателя постоянного тока к М4, М3.
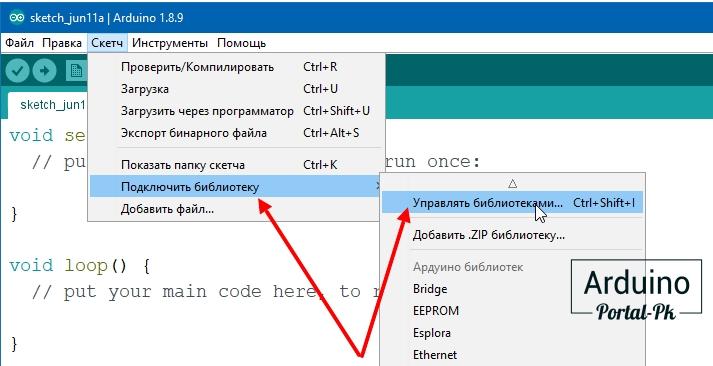
Установка библиотеки «AFMotor.h»
Для удобной работы с Motor shield L293D, необходимо установить библиотеку «AFMotor.h». Заходим в Arduino IDE, открываем вкладку «Скетч -> Подключить библиотеку -> Управлять библиотеками…»
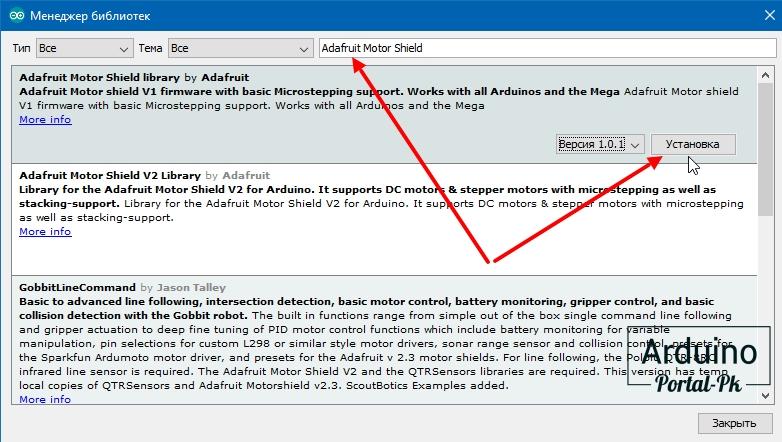
Откроется новое окно «Менеджер библиотек», в окне поиска вводим «Adafruit Motor Shield» и устанавливаем библиотеку.
Скетч управления двигателем постоянного тока с помощью Motor shield L293D.
Скетч начинается с подключения библиотеки «AFMotor.h», затем создаем объект «AF_DCMotor motor4(4)» в котором указываем номер порта двигателя (M1, M2, M3, M4). Для подключения второго двигателя «AF_DCMotor motor3(3)» и так далее.
В блоке «setup» мы вызываем функции «setSpeed(speed)» в которой задаем скорость двигателя, от 0 до 255 и функцию «motor.run» направление вращения двигателя, где «FORWARD» — вперед, «BACKWARD» — назад, «RELEASE» — остановка.
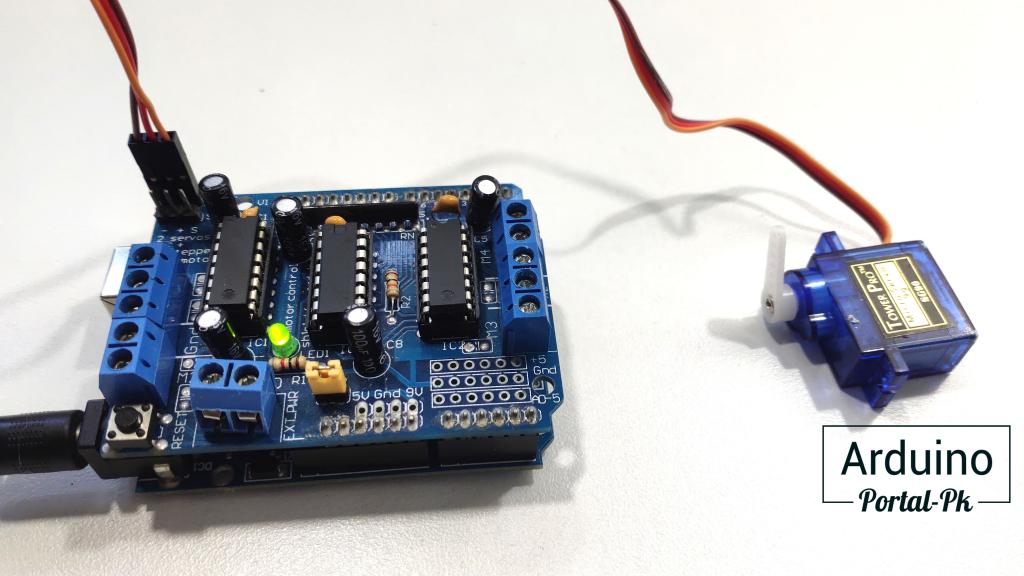
Подключение сервопривода к Motor shield L293D.
Для этого нам понадобятся следующие комплектующие:
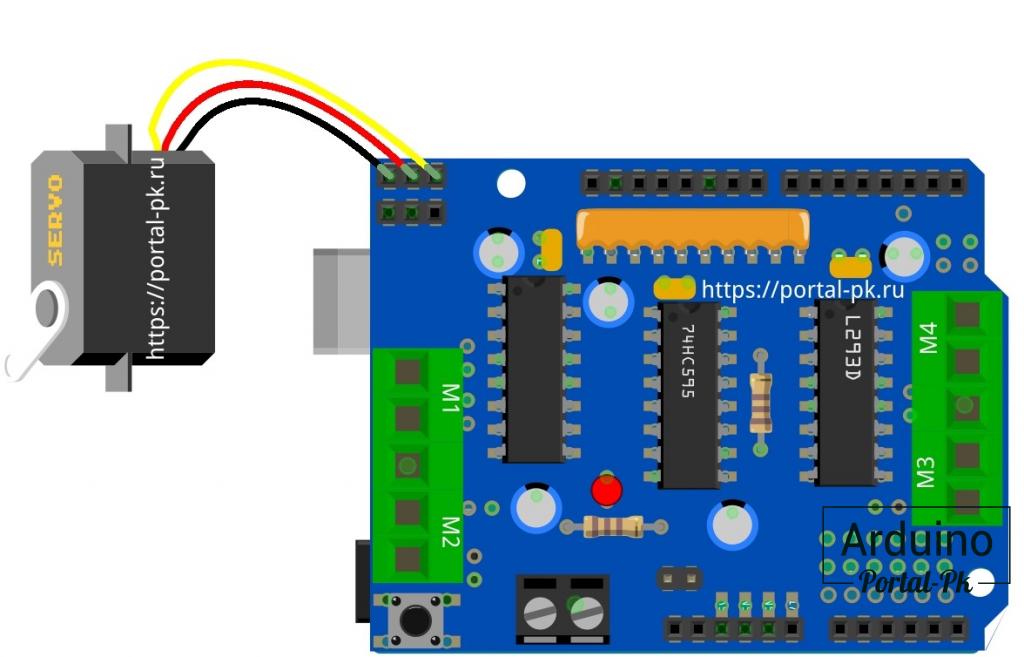
С помощью shield L293D можно управлять сервоприводами. На shield выведены 16-разрядные контакты Arduino 9 и 10, питание для сервоприводов подается от 5 вольтового стабилизатора Arduino, поэтому подключать дополнительное питание в разъем «EXT_PWR» не нужно.
Схема подключения сервопривода SG90S к Motor shield.
Скетч управления сервопривода SG90S.
Так как используется стандартный вывод PWM, нет смысла использовать дополнительную библиотеку, воспользуемся стандартной библиотекой Servo.
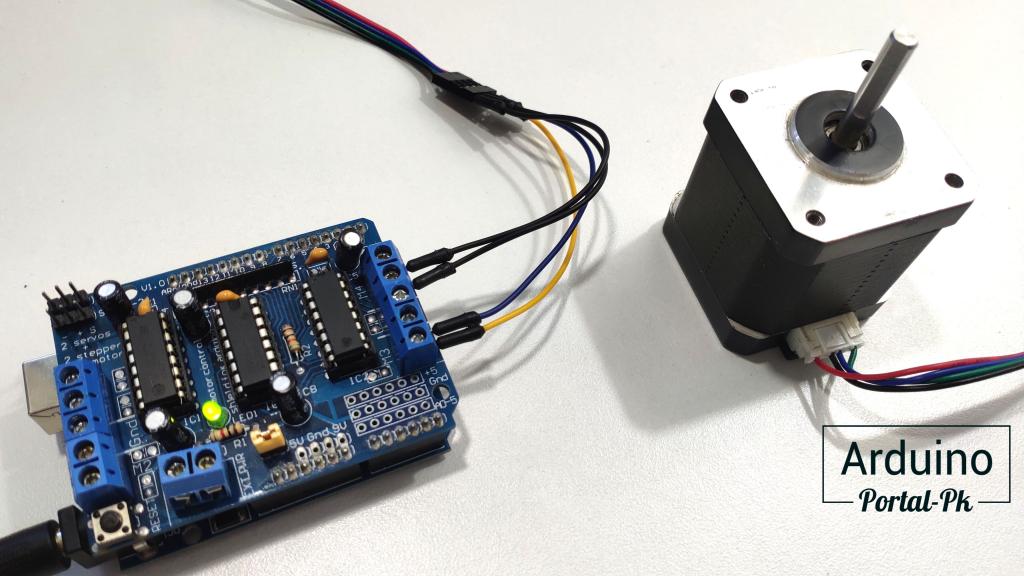
Подключение к Motor shield L293D шагового двигателя NEMO17.
Для этого нам понадобятся следующие комплектующие:
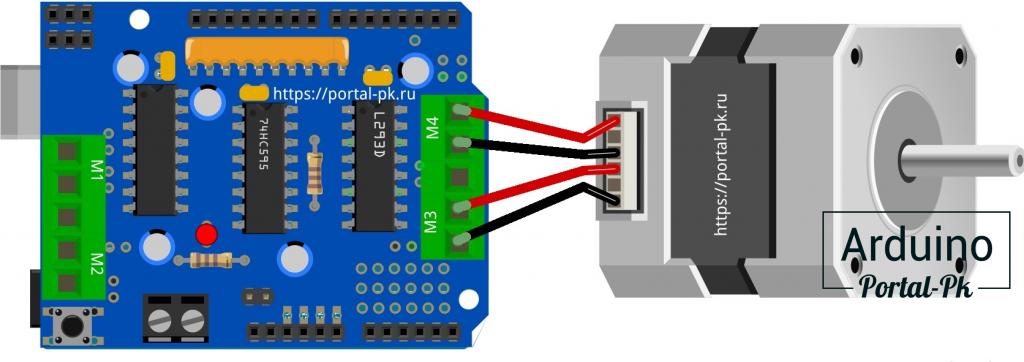
В данном примере подключим шаговый двигатель NEMA 17, который рассчитан на 12 В (и выше) и делает 200 шагов на оборот. Итак, подключите шаговый двигатель к клеммам M3 и M4. Затем подключите внешний источник питания 12 В к разъему «EXT_PWR».
Схема подключения шагового двигателя Nemo17 к Motor shield L293D.
Скетч управления шаговым двигателем Nemo17 с помощью Motor shield L293D.
Используем ту же библиотеку, что и в первом примере.
Описание кода:
Скетч начинается с подключением библиотеки «AFMotor.h». Во второй строке создаем объект «AF_Stepper motor(48, 2)» где указываем количество шагов на оборот и номер порта.
В разделе настройки, функцией «motor.setSpeed(10);» устанавливает скорость двигателя, где «10» количество оборотов в минуту.
В разделе цикла программы, мы просто вызываем две функции для управления скоростью и направлением вращения двигателя.
- «100» — это сколько шагов, необходимо сделать.
- «FORWARD»и «BACKWARD»— направление вращение двигателем.
- «SINGLE» — активация одной обмотки двигателя для совершения шага.
- «DOUBLE» — активация двух обмоток двигателя, что обеспечивает больший вращающий момент
- «INTERLEAVE» — применение ШИМ для управления шаговым двигателем двигателем.
Вывод по использованию Motor shield L293D.
Для начинающего Ардуинщика Motor shield L293D позволит реализовать роботизированную модель. Но реализовать более серьёзные проекты не получится. Так как свободных pin для подключения остается не много. Что еще мне не нравится в данном shield это то, что пины для shield заняты всегда, даже если мы подключили 2 двигателя постоянного тока. А другая пара подключения свободна, пины Arduino все равно будут заняты, и мы не сможем их использовать. Это наглядный пример того, что использования данного шилда не является универсальным и гибким решением.
Появились вопросы или предложения, не стесняйся, пиши в комментарии!
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока.
И до встречи в следующем уроке.
Понравилась статья? Поделитесь ею с друзьями:
Источник



