Рука андроид своими руками
Конструирование механизма захвата, напоминающего кисть руки человека, начинается с визита в магазин игрушек. Нам потребуется игрушка под названием Awesome Arm, выпускаемая китайской компанией Zima (см. рис. 16.17). Для того чтобы вам хватило «пальцев», необходимо купить две такие игрушки. Большой палец игрушки имеет фиксированное положение, и его нельзя использовать.

Рис. 16.17. Механическая рука Awesome компании Zima.
Игрушка работает следующим образом: «пальцы» игрушки приводятся в действие пальцами оператора, т. е. игрушка представляет собой род дистанционного манипулятора. Чтобы сделать андроидную кисть руки, нам придется разобрать игрушки и удалить из них большинство деталей.
Когда вы перевернете руку, то вы увидите пять небольших винтов, которые скрепляют конструкцию. Отверните эти винты, и конструкция распадется на части (см. рис. 16.18). Вытащите «пальцевую» часть игрушки (см. рис. 16.19). Остальные части игрушки нам не потребуются. На конце стерженьков, которые управляют «пальцами», находятся «колечки», куда оператор вставляет пальцы при управлении игрушкой. Нам эти колечки не понадобятся, поэтому необходимо удалить их с помощью кусачек, оставив длинный пластиковый стержень.

Рис. 16.18. Обратная сторона руки, где необходимо вывернуть крепежные винты.

Рис. 16.19. Пальцы с тягами, извлеченные из руки.
Детали конструкции собраны на плате. Я начал с того, что обвел контуры кисти моей правой руки на бумаге. Затем я зачернил некоторую внутреннюю часть рисунка (см. рис. 16.20). По контурам зачерненного рисунка я вырезал пластину из алюминия толщиной 3 мм.

Рис. 16.20. Контур кисти руки и положение алюминиевого основания.
Пальцы крепятся к концу платы. Сперва отметьте положение крепления пальцев на плате. Затем поместите небольшую алюминиевую пластину шириной 12 мм и толщиной 3 мм сразу за пластиковым креплением пальцев (см. рис. 16.21). Эта пластина представляет собой задний упор для крепления пальцев. Просверлите три отверстия сквозь пластинку и основание и прикрепите пластинку к основанию с помощью винтов и гаек. Укрепите алюминиевую пластинку 3×12 мм поверх пластикового основания крепления пальцев. Просверлите четыре отверстия в пластинке и плате, как это показано на рис. 16.22. Конструкция скрепляется с помощью винтов, длиной 25 мм и гаек. Эти винты имеют двойное назначение. Во-первых, они крепят основание пальцев и удерживают пальцы в конструкции. Во-вторых, к ним будет крепиться резиновая лента, обеспечивающая растяжение воздушных мышц.

Рис. 16.21. Крепление задней пластинки.

Рис. 16.22. Крепление верхней пластинки.
После того как пальцы закреплены на плате, нам необходимо прикрепить к каждому пальцу воздушную мышцу. Напомню, что для правильного сокращения воздушной мышцы она должна быть предварительно растянута. Проденьте резиновую петлю через конец воздушной мышцы. Затем отверните и выньте первый из четырех винтов длиной 25 мм, которые крепят основание пальцев. Просуньте сложенные концы резиновой петли в то место, где винт проходит через верхнюю пластинку. Вставьте винт на место, продев через него концы резиновой петли, и затем затяните с помощью гайки (см. рис. 16.23 и 16.24).

Рис. 16.23. Продеть сложенную резиновую ленту через один конец воздушной мышцы и закрепить концы ленты на винте крепления верхней пластинки.

Рис. 16.24. Общий вид крепления воздушной мышцы к тяге пальца.
Потяните воздушную мышцу за другой конец до того, как она будет полностью растянута. Заметьте положение конца воздушной мышцы. В этом месте просверлите отверстие в плате и вставьте туда винт, закрепленный с помощью гаек. Для поддержания воздушной мышцы в растянутом состоянии наденьте конечную петлю воздушной мышцы на винт (см. рис. 16.25).

Рис. 16.25. Крепление заднего конца воздушной мышцы к крепежному винту для ее растяжки.
Теперь просверлите небольшое отверстие в пластиковой части тяги пальца. Положение отверстия должно соответствовать положению передней петли крепления воздушной мышцы. Отверстие должно быть достаточно велико, чтобы в него проходил сложенный вдвое многожильный провод. Можно использовать оголенный одножильный медный провод 0,6 мм или многожильный стальной. Пропустите сложенный вдвое многожильный провод через отверстие в пластике и через отверстие петли переднего крепления мышцы. Скрепите детали путем скручивания концов провода. Если концы скрученного провода окажутся слишком длинными, то удалите излишки с помощью кусачек.
Примерный вид сверху показан на рис. 16.24. Теперь мы можем увидеть, каким образом будут сокращаться пальцы. Пальцы сокращаются при подаче сжатого воздуха в воздушную мышцу. Сократившаяся мышца воздействует на пластиковую тягу, управляющую пальцем, что в свою очередь вызывает его сокращение. Когда с воздушной мышцы снимается давление, то резиновая лента растягивает ее в первоначальное положение.
Теперь неплохо провести статическое испытание работы пальца. Соедините подачу воздуха с воздушной мышцей, чтобы убедиться в работоспособности устройства. В начальном варианте устройства для полного сгибания указательного пальца требовалось давление порядка 3 кгс.
Когда вы убедитесь, что палец работает правильно, присоедините воздушные мышцы к остальным пальцам таким же образом. На рис. 16.26 показан детальный вид воздушных мышц, соединенных с тягами соответствующих пальцев.

Рис. 16.26. Детальный вид воздушных мышц, резиновых лент и пальцевых тяг в сборе.
Источник
Кисть руки андроида
Кисть руки андроида
Конструирование механизма захвата, напоминающего кисть руки человека, начинается с визита в магазин игрушек. Нам потребуется игрушка под названием Awesome Arm, выпускаемая китайской компанией Zima (см. рис. 16.17). Для того чтобы вам хватило «пальцев», необходимо купить две такие игрушки. Большой палец игрушки имеет фиксированное положение, и его нельзя использовать.
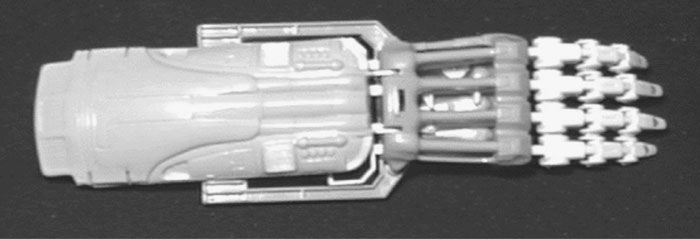
Рис. 16.17. Механическая рука Awesome компании Zima
Игрушка работает следующим образом: «пальцы» игрушки приводятся в действие пальцами оператора, т. е. игрушка представляет собой род дистанционного манипулятора. Чтобы сделать андроидную кисть руки, нам придется разобрать игрушки и удалить из них большинство деталей.
Когда вы перевернете руку, то вы увидите пять небольших винтов, которые скрепляют конструкцию. Отверните эти винты, и конструкция распадется на части (см. рис. 16.18). Вытащите «пальцевую» часть игрушки (см. рис. 16.19). Остальные части игрушки нам не потребуются. На конце стерженьков, которые управляют «пальцами», находятся «колечки», куда оператор вставляет пальцы при управлении игрушкой. Нам эти колечки не понадобятся, поэтому необходимо удалить их с помощью кусачек, оставив длинный пластиковый стержень.
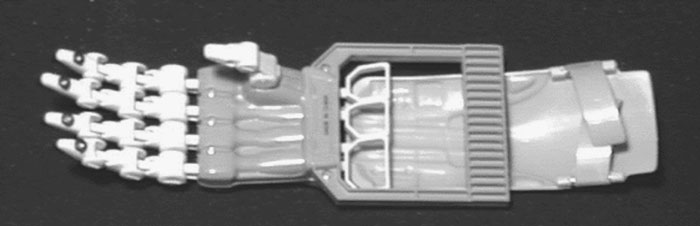
Рис. 16.18. Обратная сторона руки, где необходимо вывернуть крепежные винты
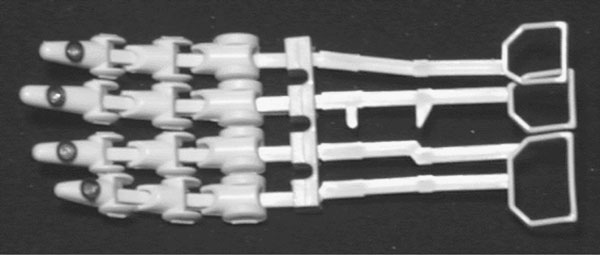
Рис. 16.19. Пальцы с тягами, извлеченные из руки
Детали конструкции собраны на плате. Я начал с того, что обвел контуры кисти моей правой руки на бумаге. Затем я зачернил некоторую внутреннюю часть рисунка (см. рис. 16.20). По контурам зачерненного рисунка я вырезал пластину из алюминия толщиной 3 мм.
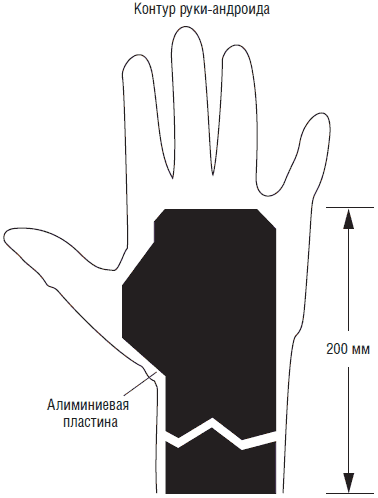
Рис. 16.20. Контур кисти руки и положение алюминиевого основания
Пальцы крепятся к концу платы. Сперва отметьте положение крепления пальцев на плате. Затем поместите небольшую алюминиевую пластину шириной 12 мм и толщиной 3 мм сразу за пластиковым креплением пальцев (см. рис. 16.21). Эта пластина представляет собой задний упор для крепления пальцев. Просверлите три отверстия сквозь пластинку и основание и прикрепите пластинку к основанию с помощью винтов и гаек. Укрепите алюминиевую пластинку 3×12 мм поверх пластикового основания крепления пальцев. Просверлите четыре отверстия в пластинке и плате, как это показано на рис. 16.22. Конструкция скрепляется с помощью винтов, длиной 25 мм и гаек. Эти винты имеют двойное назначение. Во-первых, они крепят основание пальцев и удерживают пальцы в конструкции. Во-вторых, к ним будет крепиться резиновая лента, обеспечивающая растяжение воздушных мышц.
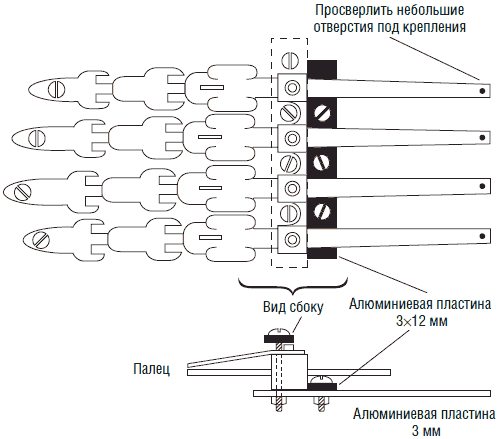
Рис. 16.21. Крепление задней пластинки
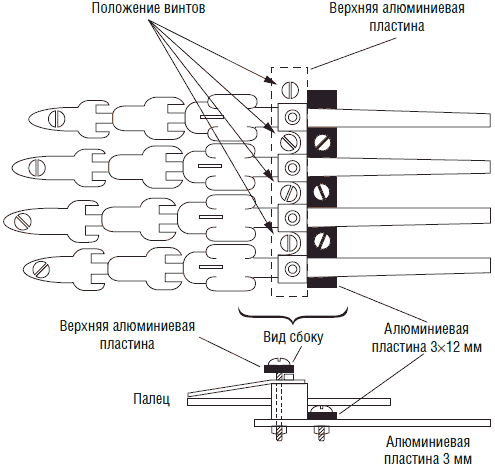
Рис. 16.22. Крепление верхней пластинки
После того как пальцы закреплены на плате, нам необходимо прикрепить к каждому пальцу воздушную мышцу. Напомню, что для правильного сокращения воздушной мышцы она должна быть предварительно растянута. Проденьте резиновую петлю через конец воздушной мышцы. Затем отверните и выньте первый из четырех винтов длиной 25 мм, которые крепят основание пальцев. Просуньте сложенные концы резиновой петли в то место, где винт проходит через верхнюю пластинку. Вставьте винт на место, продев через него концы резиновой петли, и затем затяните с помощью гайки (см. рис. 16.23 и 16.24).

Рис. 16.23. Продеть сложенную резиновую ленту через один конец воздушной мышцы и закрепить концы ленты на винте крепления верхней пластинки
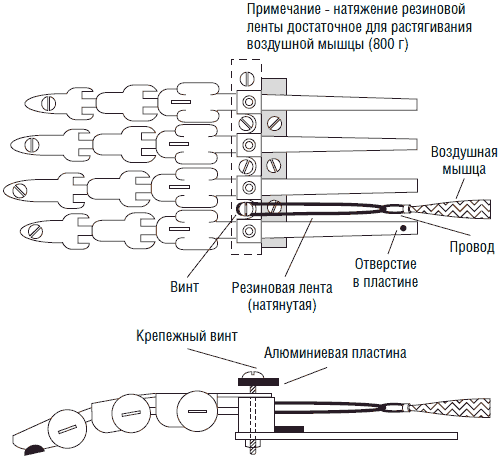
Рис. 16.24. Общий вид крепления воздушной мышцы к тяге пальца
Потяните воздушную мышцу за другой конец до того, как она будет полностью растянута. Заметьте положение конца воздушной мышцы. В этом месте просверлите отверстие в плате и вставьте туда винт, закрепленный с помощью гаек. Для поддержания воздушной мышцы в растянутом состоянии наденьте конечную петлю воздушной мышцы на винт (см. рис. 16.25).
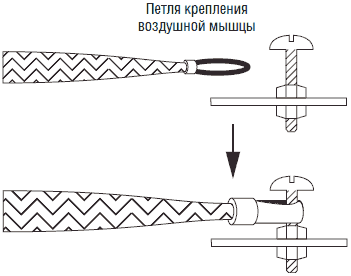
Рис. 16.25. Крепление заднего конца воздушной мышцы к крепежному винту для ее растяжки
Теперь просверлите небольшое отверстие в пластиковой части тяги пальца. Положение отверстия должно соответствовать положению передней петли крепления воздушной мышцы. Отверстие должно быть достаточно велико, чтобы в него проходил сложенный вдвое многожильный провод. Можно использовать оголенный одножильный медный провод 0,6 мм или многожильный стальной. Пропустите сложенный вдвое многожильный провод через отверстие в пластике и через отверстие петли переднего крепления мышцы. Скрепите детали путем скручивания концов провода. Если концы скрученного провода окажутся слишком длинными, то удалите излишки с помощью кусачек.
Примерный вид сверху показан на рис. 16.24. Теперь мы можем увидеть, каким образом будут сокращаться пальцы. Пальцы сокращаются при подаче сжатого воздуха в воздушную мышцу. Сократившаяся мышца воздействует на пластиковую тягу, управляющую пальцем, что в свою очередь вызывает его сокращение. Когда с воздушной мышцы снимается давление, то резиновая лента растягивает ее в первоначальное положение.
Теперь неплохо провести статическое испытание работы пальца. Соедините подачу воздуха с воздушной мышцей, чтобы убедиться в работоспособности устройства. В начальном варианте устройства для полного сгибания указательного пальца требовалось давление порядка 3 кгс.
Когда вы убедитесь, что палец работает правильно, присоедините воздушные мышцы к остальным пальцам таким же образом. На рис. 16.26 показан детальный вид воздушных мышц, соединенных с тягами соответствующих пальцев.
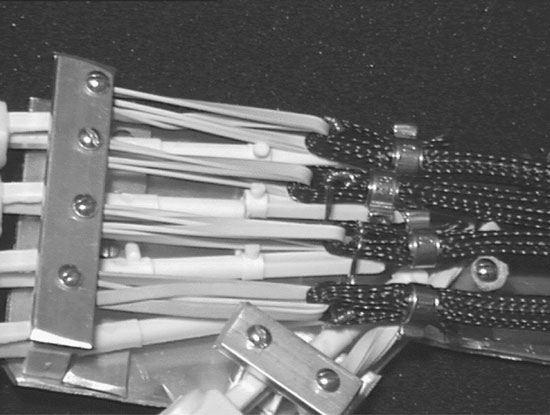
Рис. 16.26. Детальный вид воздушных мышц, резиновых лент и пальцевых тяг в сборе
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес
Читайте также
Глава 16 Кисть руки – андроида
Глава 16 Кисть руки – андроида В этой главе мы попробуем изготовить андроидную или человекоподобную кисть руки. Для приведения в движение пальцев этой руки мы будем использовать воздушные мышцы, описанные в гл. 3.Воздушная мышца представляет собой пневматическое
«Механические руки»
«Механические руки» История механических рук начинается с… атомной физики. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека
Источник
Глава 16 Кисть руки – андроида
Кисть руки – андроида
В этой главе мы попробуем изготовить андроидную или человекоподобную кисть руки. Для приведения в движение пальцев этой руки мы будем использовать воздушные мышцы, описанные в гл. 3.
Воздушная мышца представляет собой пневматическое устройство, способное линейно сокращаться при подаче сжатого воздуха. При активации эта мышца сокращается подобно живой биологической мышце. Вы можете подумать, что эту работу могут с успехом выполнять пневматические цилиндры, которые в настоящее время находят широкое применение. Это действительно так, однако воздушные мышцы в определенном смысле являются находкой и благом для конструкторов-любителей и создателей роботов, поскольку ее стоимость намного ниже, она имеет исключительно малый вес, гибкость и проста в применении.
Воздушная мышца имеет отношение развиваемой мощности к собственному весу около 400:1. Поскольку большинство частей мышцы изготовлены из резины или пластика, она способна работать во влажных условиях или даже под водой. Воздушная мышца представляет собой гибкую конструкцию, что позволяет использовать ее для соединения и сжатия соосных или несоосных блоков и рычагов. Воздушная мышца способна к сокращению, даже если ее перегнуть вдоль искривленной поверхности. Простота использования мышцы делает ее предпочтительнее обычных пневматических цилиндров в ряде экспериментов.
Безусловно, как и для любого пневматического устройства, для работы мышцы требуется сжатый воздух. Сжатый воздух не столь доступен, как электрический ток. Когда я впервые решил попробовать сделать воздушную мышцу, я думал, что создание небольшого устройства, вырабатывающего сжатый воздух, может оказаться проблемой. Как оказалось, я ошибался. Простую воздушную систему можно сделать, потратив всего лишь $25,00, а небольшая электрическая пневмосистема обойдется в $50,00.
При использовании электричества для сжатия воздуха суммарный КПД устройства падает. Однако воздушная мышца потребляет для работы очень небольшое количество воздуха, поэтому можно создать резервуар для его хранения. Мышца очень быстро реагирует на подачу воздуха и имеет короткий рабочий цикл. Небольшая мышца весом всего 10 г способна поднять вес около 6,5 кг.
Перед тем как мы начнем делать андроидную руку, мы сперва изготовим несколько демонстрационных устройств с ручным управлением, использующих воздушную мышцу. Демонстрационные устройства позволят нам подробнее познакомиться с устройством и работой воздушной мышцы, прежде чем мы примемся за более сложный проект.
Если в устройстве используются одна или две мышцы, то они могут легко управляться «вручную». Если имеется пять или шесть воздушных мышц, то для их последовательной или одновременной активации управление «вручную» становится затруднительным. В этом случае мы применяем компьютерное управление. Можно использовать компьютер IBM PC или подходящий PIC микроконтроллер. Схема интерфейса для любого компьютера сохраняется неизменной. В этой главе мы будем использовать IBM PC. Управление воздушной мышцей с помощью компьютера (порт принтера IBM или совместимый) через параллельный порт PC добавит примерно $25,00 к стоимости конструкции воздушной мышцы.
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес
Читайте также
Глава 11. Суд
Глава 11. Суд Суд как суд. Обычный советский. Всё было предрешено заранее. После двух заседаний в июне 1986 г. МВТС под председательством академика А. П. Александрова, где доминировали работники Министерства среднего машиностроения — авторы проекта реактора, была объявлена
Кисть руки андроида
Кисть руки андроида Конструирование механизма захвата, напоминающего кисть руки человека, начинается с визита в магазин игрушек. Нам потребуется игрушка под названием Awesome Arm, выпускаемая китайской компанией Zima (см. рис. 16.17). Для того чтобы вам хватило «пальцев»,
Глава 6
Глава 6 ВСТУПЛЕНИЕВ СУДЬБУШТУРМПеред боевым командиром, лишившимся возможности продолжать службу не только на подводных лодках, но и на надводных военных кораблях, было два проторенных пути. Первый — продолжать службу в штабах или управлениях. Второй путь —
Глава 1
Глава 1 ВОЗВРАЩЕНИЕВЫ ВЕРИТЕ?!Чудеса случаются во все времена. После томительных трех лет подозрений и недоверия — реабилитация.Наступила тяжелая, странная пора. Тысяча дней прокатились через жизнь Берга, и каждый день разрывал его душу и сердце. Волны раздирающих мозг
Глава 2
Глава 2 НА ПЕРЕДОВОЙПЕРЕЛОМ1943 год начинался в новых условиях. Потери немцев под Сталинградом: 175 тысяч убитых и 137 тысяч пленных, 23 дивизии в окружении — эти цифры потрясли весь мир. Громадный успех менял всю обстановку на фронтах. Оживились даже союзники. Италия
Глава 3
Глава 3 СЛОЖНЫЙФАРВАТЕРС МЕРТВОЙ ТОЧКИКак будет развиваться дальше эта необычная и обыденная история? История, так похожая на те, что разыгрываются вокруг нас и с нами в повседневной и всегда такой неповторимой жизни.События в личной жизни Берга назревали.В наркомате
Глава 4
Глава 4 КОНЕЦ!9 МАЯЕще один год позади. Встреча нового, 1945 года в стране прошла спокойно. Наши войска уже дрались близ Будапешта, и каждый день ожидалось сообщение о его взятии. Союзники, увы, не очень старались, и немцы их изрядно поколачивали. Но теперь развязка близилась,
Глава 1
Глава 1 И В ШУТКУ, И ВСЕРЬЕЗЦУНАМИЧудеса и впрямь случаются во все времена, даже в области медицины. Полтора года Берг боролся за жизнь. Смерть отступила. После трехстороннего инфаркта, поразившего его 20 июня 1956 года в поезде на пути из Ленинграда в Москву, проходят многие и
Глава 2
Глава 2 ПАРАЛЛЕЛИУГЛУБЛЯЮТСЯЧЕМ НЕ ГОЛЕМ!Когда советские кибернетики перестали тратить часть усилий на споры, а сосредоточились на своих прямых обязанностях, их детища — кибернетические машины начали делать быстрые успехи.Электронные машины взбираются все выше по
Глава 3
Глава 3 БЕЛЫЙ ФЕРЗЬ ПОКИНУЛ СТОЯНКУПЕРВАЯ ДУЭЛЬПостепенно пришло время, когда сообщения об успехах советских кибернетических машин перестали восприниматься как нездоровая сенсация. Они сделались вестниками будней. Но удивлять людей ЭВМ продолжали — у них в запасе было
Глава 4
Глава 4 ВСТРЕЧА НА ВЕРШИНЕРОЗЫ И РЫБАЧитаешь «Проблемные записки», и бросается в глаза органическое переплетение многочисленных научных направлений, тесное содружество разных секций. Секция бионики, например, изучает живые организмы с целью перенесения в технику
Глава 5
Глава 5 САМЫЙ СЧАСТЛИВЫЙ ДЕНЬПРАВЫ ЛИ ЙОГИ!Мальчишка, чтобы сделать снежную бабу, скатал в ладонях маленький комок снега, бросил его на землю, покатил, и комочек стал расти, наслаиваясь новыми снежными пластами. Катить его труднее и труднее… Мальчишка вытирает варежкой
Глава 1
Глава 1 КАК СТАТЬ ЭЙНШТЕЙНОМ!НЕ ПОПРОБОВАТЬ ЛИ ГНИЛЫХ ЯБЛОК?Я приоткрыла дверь и, стараясь не привлекать к себе внимания, тихонько присела на свободный стул. В небольшой комнате за Т-образным столом сидело человек двадцать. Впрочем, я не успела ни сосчитать присутствующих,
Глава 3
Глава 3 ПЛЕЯДА СОКРАТОВУЧИТЬСЯ, ЧТОБЫ ВЫЖИТЬПрограммированным обучением у нас начали заниматься в шестидесятых годах, а зародилось оно в США в пятидесятых. Случилось это после того, как в США был издан закон об обороне, где уделялось особое внимание улучшению состояния
«Механические руки»
«Механические руки» История механических рук начинается с… атомной физики. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека
Глава 1
Глава 1 КЛАССИФИКАЦИЯ И ОСОБЕННОСТИ Более ста лет назад (илл. 1), в 1887 году в Москве на русском языке вышла книга В.В. Гринера «Ружьё». Есть там упоминание и о ружьях с односпусковым механизмом. В то далёкое время автор уже пишет, что, по его мнению, ружьё будущего будет
Источник



