- Машинка на Arduino, управляемая Android-устройством по Bluetooth, — полный цикл (часть 1)
- Введение
- Немного об уровне, авторе и предостережения
- Задача
- Понадобится
- Основа конструкции
- Установка Arduino
- Определение угла поворота
- Подключение угла и код
- Распараллеливание ходовых колес
- Подключение Bluetooth
- Система отправки команд
- Заключение первой части
- Машинка на Arduino, управляемая Android-устройством по Bluetooth, — код приложения и мк (часть 2)
- О первый части
- Android-приложение
- Верстка
- Манифест
- Основная активность, сопряжение Arduino и Android
- Управление и отправка команд
- Подводим итоги Андроид-приложения
- Скетч Arduino
- Переменные
- Метод setup()
- Метод loop() и дополнительные функции
- Итоги скетча
- В конце концов
Машинка на Arduino, управляемая Android-устройством по Bluetooth, — полный цикл (часть 1)
Введение
Подробная история того, как из трех двигателей была собрана машина на Arduino, управляемая Android-устройством по Bluetooth. В нескольких десятках абзацев постараюсь максимально пошагово изложить, куда подключить каждый из проводов, как написать фирменное приложение и на каких детских граблях пришлось попрыгать больше недели.
Немного об уровне, авторе и предостережения
Я, автор, пацан 16-17 лет с подмосковной деревни, специализируюсь на написании android-приложений (а там сложнее что-то сжечь), поэтому ответственность за оптимальный подход к решению задач с себя снимаю.
Практически каждый из нижеописанных этапов занимал у меня больше, чем стоило бы, времени. Наверно, именно по этой причине хочу поделиться опытом. И при этом буду очень рад, если поругаете за ошибки и подскажите за оптимизацию.
Задача
Понадобится
Основа конструкции
За основу была взята машина Lego Outdoor Challenger (в реальности выглядит менее пафосно). Все, что от нее осталось: корпус (все элементы украшения сняты) и три двигателя. 
У машинки была своя плата, но одна из задач подразумевала универсальность: это сделал я, это смогут повторить другие. Мозги вынул, поставил Arduino Uno.
Установка Arduino
Создатели почему-то не предусмотрели места для Arduino, потому крепил на шурупы, просверлив пластик. Под плату подложил фанеру, чтобы ничего не закоротило. Под шурупы лучше подсунуть что-то пластиковое (кусочек бутылки), ибо плата от железный болтов не защищена.

Поверх платы сразу поставил две motor shiled, так надо. Чтобы управлять второй, придется прокинуть один провод с любого digital порта на H1 (направление) и второй с пина с поддержкой шима (помечены знаком «
», обычно 10, 11) на E1 (скорость).
Определение угла поворота
За поворот машинки отвечает на удивление не сервопривод, а обычный двигатель. Встает проблема: хорошо бы было его не сжечь, ведь угол поворота ограничен, а крутиться двигатель может сколько угодно.
Вариант с методом тыка отпадает, так как при разном уровне батареи количество тока, подаваемое на двигатель, будет изменяться, что приведет к постоянно меняющемуся углу. Крутить до упора тоже нельзя, рано или поздно рассыплются шестеренки.
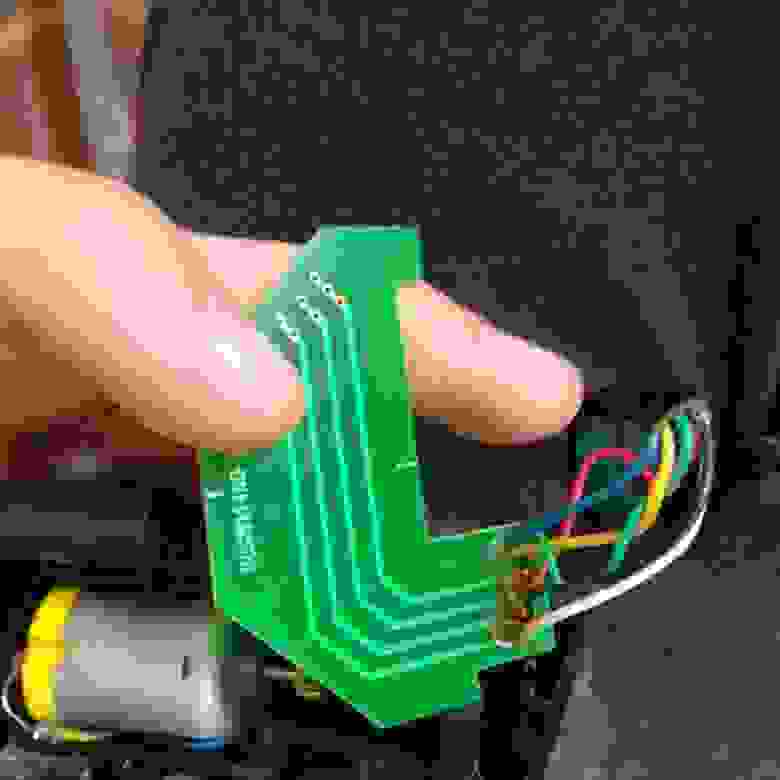
Решение проблемы: отслеживать угол через замыкание. На фото продемонстрирована небольшая штучка, которая крепится недалеко от поворотного механизма. На часть, которая крутится вместе с колесами влево/вправо двигателем, прикрепляется гребешок с железными контактами.

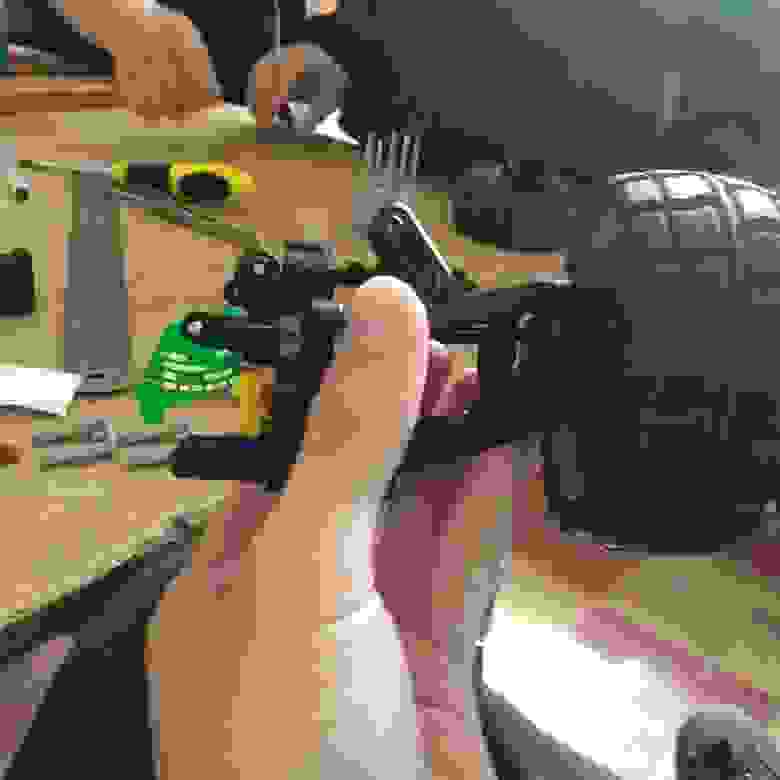
Принцип работы: к каждой линии припаивается провод (всего их четыре), нижний подключается к плюсу (он зажат гребешком всегда, см. картинку), остальные провода уходят на минус. Когда зубик гребешка попадает и на нижний ряд, и на, допустим, третий, происходит замыкание, ток течет, это замечает Arduino.
Благодаря различным комбинациям трех полос, можно определить до семи углов. Например, когда ток есть на всех линиях, колеса повернуты в крайнее правое положение, когда ток есть только на верхней, колеса повернуты максимально влево. В таблице предоставлены все варианты.
Подключение угла и код
Для каждого уровня был выбран свой цвет: нижний – зеленый, первый снизу – красный, второй – черный, третий – белый. На начальном этапе использовались breadboard и светодиоды для визуальной отладки.

Схема подключения показана на рисунке. Плюс тянем к зеленому, остальные протягиваем к минусу. Через резистор, установленный для устранения помех и отсутствия КЗ, подключаем провода к выходам A0-A2. Выбраны они просто из экономии остальных портов.
Код дан с комментариями. Подключаем пины и опрашиваем их через digitarRead(). Если напряжение есть, вернется значение true. Далее смотрим, если результат означает, что колеса в крайних положениях, запрещаем дальнейший поворот в эту сторону.
Небольшая хитрость: поскольку выходы на 5В и 3.3В понадобятся в будущем, можно поставить плюс на один из digital-пинов. Перед каждой проверкой угла выдавать ток через digitalWrite(whitePin), потом проверять угол и убирать ток.
Распараллеливание ходовых колес
Изначально два ходовых двигателя соединены вместе. Их рассоединил по двум причинам: поворот эффективней, если колеса крутятся в разные стороны, и два мощных двигателя одна плата не вытянет.
Проблема: у motor shield два выхода, каждый из которых выдает до 2 ампер. Каждый двигатель ест по 0,7А. Вроде меньше, но не при максимальных нагрузках. Допустим, машинка застряла в песке или уперлась, ток возрастает выше ампера. Не критично, но потенциально опасно.
А вот критичным оказалось то, что плата греется. Через минуты полторы после заезда, motor shield нагревалась и начинала работать безобразно: токи подаются не те, колеса не крутятся и прочее.
Решение обоих проблем: один двигатель подключил к одной motor shield, второй – к другой. Как ни странно, помогло. Температура упала, перегрев отсутствует. Можно было поставить радиатор, но крепить тяжело.
Подключение Bluetooth
Я использовал модель HC-05, что сыграло роковую шутку. Подключаются все блютузы одинаково: один провод на 3.3В (иногда начинал работать только от 5В), второй на минус, еще два на порт 0 и 1 (чтение и отправка соответственно). Провод, подписанный RXD на bluetooth, втыкается в TXD ардуино, а TXD в RXD (если перепутаете, то данных не увидите).
Есть оговорка: порты 0 и 1 по умолчанию используются Serial, через который заливает скетч. То есть, пока воткнут блютуз, скетч не зальется. Есть два выхода: вынимать блютуз на время заливки или переназначить входы и выходы блютуза. Второй вариант осуществляется двумя строчками
Подводный камень, съевший у меня трое суток работы – скорость общения. По привычке установил 9600 и пошел пробовать. То данные не приходили, то была каша символов. И в конце концов ответ – модель HC-05 общается на 38400! Очень сильно обратите внимание на то, что в Setup() я выполню BTSerial.begin(39400), хотя Serial.begin(9600).
Система отправки команд
Статья становится слишком длинной, поэтому рассмотрение кода Arduino и Android вынесу в отдельную вторую часть, а сейчас опишу принцип.
На андроид устройстве есть джойстик (круг, о реализации которого также во второй части). Андроид считывает показания с него и конвертирует их в подходящие для ардуино числа: скорость из пикселей превращает в значение от -255 до 255 (отрицательные – задний ход), а также определяет угол. Я сознательно отдал эту задачу телефону, так как он куда мощнее и спокойно справится с подсчетом нескольких сотен значений в секунду.
После установки сокета данные отправляются в следующем формате: @скорость#*угол#. @ — говорит о том, что следующие цифры содержат скорость, # — извещает об окончании значения скорости, * — начало значения угла, # — закончить запись угла. Цикл бесконечен, команды отправляются каждые 100 миллисекунд (цифра подобрана оптимальная). Если ничего не нажато на андроиде, то ничего и не отправляется.
Алгоритм приема данных подробно описан в коде скетча. Он не раз переписывался и, как по мне, работает идеально.
Заключение первой части
В этой статье я попытался раскрыть все, что касается физической части машинки. Вероятнее всего, что-то упустил, так что обязательно спрашивайте.
Но самое интересное, как по мне, осталось на второе – программа Arduino и приложение на Android, там творится настоящая магия, по крайней мере, для молодого меня.
Источник
Машинка на Arduino, управляемая Android-устройством по Bluetooth, — код приложения и мк (часть 2)
О первый части
В первой части я описал физическую часть конструкции и лишь небольшой кусок кода. Теперь рассмотрим программную составляющую — приложение для Android и скетч Arduino.
Вначале приведу подробное описание каждого момента, а в конце оставлю ссылки на проекты целиком + видео результата, которое должно вас разочаровать ободрить.
Android-приложение
Программа для андроида разбита на две части: первая — подключение устройства по Bluetooth, вторая — джойстик управления.
Предупреждаю — дизайн приложения совсем не прорабатывался и делался на тяп-ляп, лишь бы работало. Адаптивности и UX не ждите, но вылезать за пределы экрана не должно.
Верстка
Стартовая активность держится на верстке, элементы: кнопки и layout для списка устройств. Кнопка запускает процесс нахождения устройств с активным Bluetooth. В ListView отображаются найденные устройства.
Экран управления опирается на верстку, в которой есть только кнопка, которая в будущем станет джойстиком. К кнопки, через атрибут background, прикреплен стиль, делающий ее круглой.
TextView в финальной версии не используется, но изначально он был добавлен для отладки: выводились цифры, отправляемые по блютузу. На начальном этапе советую использовать. Но потом цифры начнут высчитываться в отдельном потоке, из которого сложно получить доступ к TextView.
Файл button_control_circle.xml (стиль), его нужно поместить в папку drawable:
Также нужно создать файл item_device.xml, он нужен для каждого элемента списка:
Манифест
На всякий случай приведу полный код манифеста. Нужно получить полный доступ к блютузу через uses-permission и не забыть обозначить вторую активность через тег activity.
Основная активность, сопряжение Arduino и Android
Наследуем класс от AppCompatActivity и объявляем переменные:
Метод onCreate() опишу построчно:
Нижеприведенные функции проверяют, получено ли разрешение на использование блютуза (без разрешение пользователя мы не сможем передавать данные) и включен ли блютуз:
Если все проверки пройдены, начинается поиск устройства. Если одно из условий не выполнено, то высветится уведомление, мол, «разрешите\включите?», и это будет повторяться, пока проверка не будет пройдена.
Поиск устройства делится на три части: подготовка списка, добавление в список найденных устройств, установка соединения с выбранным устройством.
Когда Bluetooth-модуль, повешенный на Arduino (подробнее об этом далее), будет найден, он появится в списке. Нажав на него, вы начнете создание socket (возможно, после клика придется подождать 3-5 секунд или нажать еще раз). Вы поймете, что соединение установлено, по светодиодам на Bluetooth-модуле: без соединения они мигают быстро, при наличии соединения заметно частота уменьшается.
Управление и отправка команд
После того как соединение установлено, можно переходить ко второй активности — ActivityControl. На экране будет только синий кружок — джойстик. Сделан он из обычной Button, разметка приведена выше.
В методе onCreate() происходит все основное действо:
Обратите внимание (!) — мы узнаем, сколько пикселей занимает кнопка. Благодаря этому получаем адаптивность: размер кнопки будет зависеть от разрешения экрана, но весь остальной код легко под это подстроится, потому что мы не фиксируем размеры заранее. Позже научим приложение узнавать, в каком месте было касание, а после переводить это в понятные для ардуинки значения от 0 до 255 (ведь касание может быть в 456 пикселях от центра, а МК с таким числом работать не будет).
Далее приведен код ControlDriveInputListener(), данный класс располагается в классе самой активности, после метода onCreate(). Находясь в файле ActivityControl, класс ControlDriveInputListener становится дочерним, а значит имеет доступ ко всем переменным основного класса.
Не обращайте пока что внимание на функции, вызываемые при нажатии. Сейчас нас интересует сам процесс отлавливания касаний: в какую точку человек поставил палец и какие данные мы об этом получим.
Обратите внимание, использую класс java.util.Timer: он позволяет создать новый поток, который может иметь задержку и повторятся бесконечное число раз через каждое энное число секунд. Его нужно использовать для следующей ситуации: человек поставил палец, сработал метод ACTION_DOWN, информация пошла на ардуинку, а после этого человек решил не сдвигать палец, потому что скорость его устраивает. Второй раз метод ACTION_DOWN не сработает, так как сначала нужно вызвать ACTION_UP (отодрать палец от экрана).
Чтож, мы запускаем цикл класса Timer() и начинаем каждые 10 миллисекунд отправлять те же самые данные. Когда же палец будет сдвинут (сработает ACTION_MOVE) или поднят (ACTION_UP), цикл Timer надо убить, чтобы данные от старого нажатия не начали отправляться снова.
Обратите еще раз внимание: отсчет x и y метод onTouch() ведет от верхнего левого угла View. В нашем случае точка (0; 0) находится у Button тут:
Теперь, когда мы узнали, как получить актуальное расположение пальца на кнопки, разберемся, как преобразовать пиксели (ведь x и y — именно расстояние в пикселях) в рабочие значения. Для этого использую метод calculateAndSendCommand(x, y), который нужно разместить в классе ControlDriveInputListener. Также понадобятся некоторые вспомогательные методы, их пишем в этот же класс после calculateAndSendCommand(x, y).
Когда данные посчитаны и переведены, в игру вступает второй поток. Он отвечает именно за отправку информации. Нельзя обойтись без него, иначе сокет, передающий данные, будет тормозить отлавливание касаний, создастся очередь и все конец всему короче.
Класс ConnectedThread также располагаем в классе ActivityControl.
Подводим итоги Андроид-приложения
Коротко обобщу все громоздкое вышеописанное.
- В ActivityMain настраиваем блютуз, устанавливаем соединение.
- В ActivityControl привязываем кнопку и получаем данные о ней.
- Вешаем на кнопку OnTouchListener, он отлавливает касание, передвижение и подъем пальца.
- Полученные данные (точку с координатами x и y) преобразуем в угол поворота и скорость
- Отправляем данные, разделяя их специальными знаками
А окончательное понимание к вам придет, когда вы посмотрите весь код целиком — github.com/IDolgopolov/BluetoothWorkAPP.git. Там код без комментариев, поэтому смотрится куда чище, меньше и проще.
Скетч Arduino
Переменные
Для начала рассмотрим константы и переменные, которые понадобятся.
Метод setup()
В методе setup() мы устанавливаем параметры пинов: будут работать они на вход или выход. Также установим скорость общения компьютера с ардуинкой, блютуза с ардуинкой.
Метод loop() и дополнительные функции
В постоянно повторяющемся методе loop() происходит считывание данных. Сначала рассмотрим основной алгоритм, а потом функции, задействованные в нем.
Получаем результат: с телефона отправляем байты в стиле «@скорость#угол#» (например, типичная команда «@200#60#». Данный цикл повторяется каждый 100 миллисекунд, так как на андроиде мы установили именно этот промежуток отправки команд. Короче делать нет смысла, так как они начнут становится в очередь, а если сделать длиннее, то колеса начнут двигаться рывками.
Все задержки через команду delay(), которые вы увидите далее, подобраны не через физико-математические вычисления, а опытным путем. Благодаря всем выставленным задрежам, машинка едет плавно, и у всех команд есть время на отработку (токи успевают пробежаться).
В цикле используются две побочные функции, они принимают полученные данные и заставляют машинку ехать и крутится.
Поворачивать, когда андроид отправляет данные о том, что пользователь зажал угол 60, 90, 120, не стоит, иначе не сможете ехать прямо. Да, возможно сразу не стоило отправлять с андроида команду на поворот, если угол слишком мал, но это как-то коряво на мой взгляд.
Итоги скетча
У скетча всего три важных этапа: считывание команды, обработка ограничений поворота и подача тока на двигатели. Все, звучит просто, да и в исполнении легче чем легко, хотя создавалось долго и с затупами. Полная версия скетча.
В конце концов
Полноценная опись нескольких месяцев работы окончена. Физическая часть разобрана, программная тем более. Принцип остается тот же — обращайтесь по непонятным явлениям, будем разбираться вместе.
А комментарии под первой частью интересны, насоветовали гору полезнейших советов, спасибо каждому.
Источник



