- Игрушки-шпионы и гоночные машинки управляемые со смартфона!
- Вступление
- Выбор моделей для покупки
- Silverlit Ferrari Enzo
- Silverlit 86068 Car Kit Porsche
- i-Spy Tank
- Rover 2.0 App-Controlled Wireless Spy Tank
- Смартфон управляет игрушечным автомобилем
- Собираем свою Bluetooth машинку с управлением на Android
- Выбираем компоненты
- Соединяем bluetooth с управляющей платой
- Удалённое управление
- Соединяем управляющую плату с моторами
Игрушки-шпионы и гоночные машинки управляемые со смартфона!
Игрушечный автомобиль на дистанционном управлении для многих поколений мальчишек остается желанной мечтой. Никакая видеоигра не передаст ощущения того, что ты действительно можешь что-то физически контролировать, как это возможно с радиоуправляемой машинкой. Сегодня реализовать это все на практике стало еще проще благодаря мобильным технологиям.
Вступление
В этом обзоре мы решили рассмотреть интересную категорию компактных радиоуправляемых автомобилей и вездеходов. Такие игрушки всегда были весьма дорогим удовольствием, часто недоступным для многих покупателей. Однако сегодня появляется все больше устройств на дистанционном управлении, цена на которые существенно ниже, потому что в качестве пульта используется самый обыкновенный смартфон на Android или iOS.
Чтобы покупать модные гаджеты в США и отправлять покупки надежным способом в Россию, регистрируйтесь в Бандерольке. Вы получите адрес в штате Делавэр, на который будут поступать заказы. Со склада Бандерольки вы оформляете доставку в Россию до своего дома или в ближайший пункт ПВЗ.

И если маленький автомобиль оснащен лишь простой возможностью передвижения, то продвинутые вездеходы несут на борту беспроводную ИК-камеру ночного видения, передающую потоковое видео на экран устройства и ведущую фото/видеосъемку. Также, они поддерживают голосовую связь на расстоянии и прочие интересные функции.
Есть ряд моментов, которые стоит учитывать при покупке игрушки, а именно: экономичность потребления энергии, тип элемента питания (встроенный аккумулятор или батарейки), дальность контроля по радиочастотному каналу (для Bluetooth — до 10 м, для Wi-fi — до 50-100 м), скорость движения. Проблема игрушек на батарейках в том, что элементы питания необходимо регулярно заменять, либо же сразу покупать дорогие перезаряжаемые. К тому же, такие батарейки (NiMH и NiCD) придется держать на зарядке длительное время, а еще они подвержены «эффекту памяти» — потере емкости в случае нарушения рекомендованного режима зарядки. Для маленьких радиоуправляемых машин идеальным вариантом является наличие в стандартной комплектации литий-ионного аккумуляторного блока с подзарядкой от компьютера.
Выбор моделей для покупки
Помимо продаж через официальные магазины и сети дистрибьюторов, многие производители предлагают свою продукцию по выгодной цене на ]]> Амазоне ]]> , ведь именно эта интернет-площадка славится огромным притоком посетителей и всячески пытается поддерживать высокий уровень обслуживания (чего стоит один только ]]> Amazon Prime ]]> — подробнее о нем в нашей статье). Благодаря многочисленным отзывам посетителей, легко сделать выводы о качестве продукции того или иного бренда. В процессе самостоятельного поиска машинок и вездеходов с управлением на Android и iOS вы увидите достаточно много негативных откликов покупателей. Пользователи сетуют на многочисленные недостатки радиоуправляемых моделей. По этой причине мы сделали свою подборку товаров от проверенных производителей: ]]> ZenWheels ]]> , ]]> Silverlit ]]> , ]]> Happy Cow ]]> , ]]> Midea Tech ]]> , ]]> Brookstone ]]> .
One ZenWheels Micro Rc Car
Канадская компания ]]> ZenWheels ]]> занимается созданием миниатюрных машин с Bluetooth-управлением. Как это ни удивительно, но их товары по вкусу далеко не только детям! Суть в том, что в подвижном гаджете установлено реечное рулевое управление, которое, в свою очередь, обеспечивает плавность езды и высокую маневренность. Более того, в крошечных автомобилях работают поворотники, фары, звуковое оповещение (в том числе сигнализация). Такие приятные детали выделяют One ZenWheels Micro Rc Car среди аналогичных радиоуправляемых машинок.
Для управления машинкой достаточно скачать бесплатное приложение с официального сайта. К слову, ZenWheels разработали весьма удачный беспроводной протокол для контроля за функциями игрушки. В стандартной комплектации есть также 10 небольших конусов-препятствий для тренировки маневров любой сложности.

]]> Купить One ZenWheels Micro Rc Car на Амазоне за 89.99$ ]]>
Silverlit Ferrari Enzo
Silverlit — еще один отменный производитель гаджетов с управлением по Bluetooth для iPhone, iPod и iPad. Спорткар Silverlit Ferrari Enzo — это точная копия машины, выполненная по лицензии автогиганта Ferrari в масштабе 1:50. Нужно отметить прекрасное управление с помощью iOS-приложения, в котором программная оболочка повторяет своим дизайном приборную панель настоящего автомобиля.
Благодаря акселерометру управление и ускорение дается легче на интуитивном уровне, что также повышает маневренность машины.
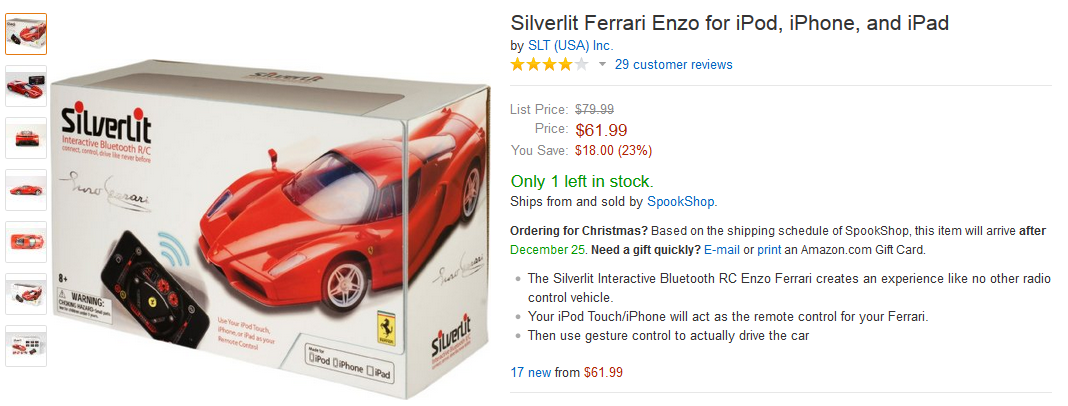
]]> Купить Silverlit Ferrari Enzo на Амазоне за 61.99$ ]]>
Silverlit 86068 Car Kit Porsche
Еще одна интересная радиоуправляемая модель машины — точная копия Porsche 911 Carrera в масштабе 1:16. Благодаря датчику столкновений в игрушке и эффекту вибрации мобильного устройства, гонки будут ощущаться намного динамичнее. У модели работают фары, «аварийка». Нужное освещение включается автоматически в зависимости от направления. Для большей реалистичности разработчики внедрили звуковое сопровождение для мобильных устройств Apple (шум мотора).
]]> Купить Silverlit 86068 Car Kit Porsche на Амазоне за 43$ ]]>
i-Spy Tank
Это небольшой шпионский вездеход с управлением на «яблочных» устройствах от компании ]]> Happy Cow ]]> . Радиоуправляемая модель умеет транслировать потоковое изображение со звуком прямо на экран мобильного телефона или планшета, которое при помощи софта можно записать. Для этого на башне установлена поворотная камера, меняющая не только горизонтальный, но и вертикальный ракурс.
Режим ночного видения позволяет рассматривать предметы в темноте. Явное преимущество i-Spy Tank — это реализация беспроводного управления по Wi-Fi (4-канальность), так что радиус действия сигнала варьируется от 70 м на открытом пространстве, и до 35 м в помещении с учетом стен. Акселерометр смартфона обеспечивает реалистичное рулевое управление. Питается вездеход шестью аккумуляторными батарейками типа AA (в комплект не входят), которых достаточно для 80 минут активной эксплуатации.

]]> Купить i-Spy Tank на Амазоне за 79.99$ ]]>
Rover 2.0 App-Controlled Wireless Spy Tank
Это модель вездехода от ]]> Brookstone ]]> очень похожа на предыдущую, ведь совмещает те же самые функции и решает аналогичные задачи. С Rover 2.0 шпионские видеосъемки будут интересней, ведь в отличие от i-Spy Tank тут установлена широкоугольная поворотная видеокамера с улучшенным ночным видением.
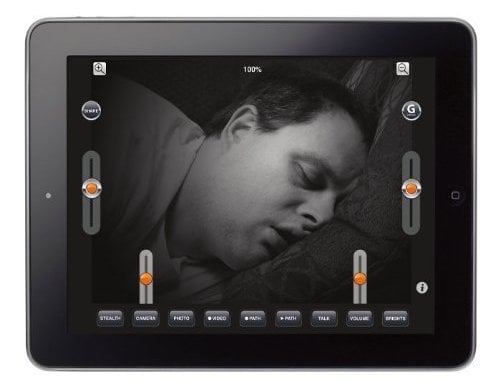
Программное обеспечение для iOS и Android открывает множество функций, в том числе онлайн-трансляцию на смартфон/планшет, моментальную загрузку отснятого контента в социальные сети.
В комплекте идут 6 батареек AA, которых должно хватить лишь на первое время.
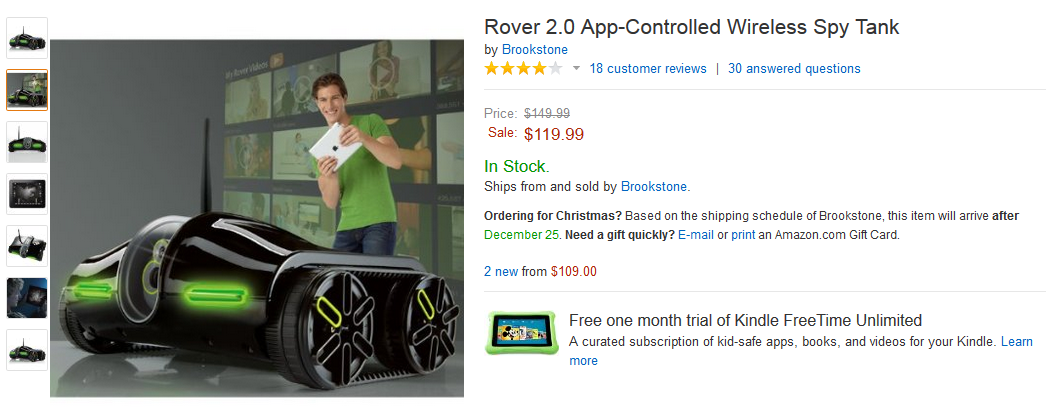
]]> Купить Rover 2.0 на Амазоне за 119.99$
Мир цифровых гаджетов не перестает удивлять. Игрушки с дистанционным управлением на смартфоне или планшете порадуют не только ребенка, но и позволят развлечься взрослым в скучной офисной обстановке. Если вы любите скоростные гонки, обратите внимание на продукты ZenWheels и Silverlit, тогда как вездеход с видеокамерой— настоящая находка для шпионов!
Ну вот и все, регистрируйтесь на нашем сайте и покупайте современные игрушки в США, ведь это просто и выгодно!
Источник
Смартфон управляет игрушечным автомобилем
За прошедшее десятилетие у многих появилось один два смартфона лежащих без дела, так и у меня. Решил применить смартфон для управления чем-нибудь, ну например, автомобилем.
Для начала выбрал игрушечный автомобиль из Лего. Он может двигаться вперед и назад, поворачивать вправо и влево и имеет пульт ДУ c ИК лучами. В качестве драйвера двигателей машинки используется микросхема LB1836, которая имеет четыре информационных входа. In1, In2 — управляют ходовым двигателем, In3, In4 — управляют приводом руля, по схеме 0, 0 или 1, 1 — нерабочее состояние. 0, 1 или 1, 0 — вращение двигателя в одну или другую сторону.
Логические 0 и 1 на входах формирует приемник ИК лучей игрушки при получении сигналов от ДУ.
Я для передачи сигналов от смартфона к машинке решил использовать экран смартфона, поскольку другие каналы передачи технически сложные и дорогие в реализации. К входам микросхемы LB1836 я решил подсоединить свое устройство, которое будет получать сигналы от смартфона.
Схема передачи сигналов такая. Программа в смартфоне создает световые пятна заданной продолжительности на экране, устройство их регистрирует и формирует логические 0 и 1 той же продолжительности на входах LB1836 без какой либо логической обработки, что очень упрощает конструкцию устройства. То есть, я просто подменил приемник ИК лучей своим устройством.
Устройство приема световых сигналов состоит из 4 ячеек. Каждая ячейка представляет собой фототранзистор L-3DP3C KGB подсоединенный к усилителю на npn транзисторе KT315. Питание берется с управляемой машинки. Выход, как я уже говорил, подсоединяется к соответствующему входу драйвера двигателя. Маломощные двигатели могут питаться прямо от выхода, но вращаться будут только в одну сторону. Но зато их будет четыре!

О выборе элементов устройства могу сказать следующее. Транзисторы я взял те, какие у меня были с давних времен. Фототранзисторы купил те, что были в магазине. Так что, желающие повторить схему, не тратьте время на поиски, воспользуйтесь теми элементами, что вам доступны. Кстати, вначале я усилитель собрал на микросхеме LM 324N с четырьмя операционными усилителями. Тоже хорошо работает, но мне показались его габариты слишком большими.
Устройство собрал на картонке, используя полоски медной фольги и элементы конструктора Лего.

Фототранзисторы помещены на дно световых колодцев диаметром 5мм и глубиной 9 мм, что бы исключить боковое засвечивание. В световые колодцы вставлены металлизированные плёнки, свёрнутые в трубочку, что значительно повышает чувствительность фототранзисторов, за счет увеличения светового потока.

Вот такой получился автомобиль.

Для разработки программы я взял, приложение BASIC! из Googl Play Маркет. Это приложение позволяет писать программы для Android, создавать файлы apk и работать со всеми сенсорами и устройствами смартфона.
В программе используется управление голосом как наиболее целесообразное в моем случае. Объект TTS преобразует текст в речь. Объект STT преобразует речь в текст. При работе STT обязательно должен быть включен Wi Fi, потому что записанная фонограмма отправляется на сервер в интернете, откуда приходит результат распознавания, это несколько слов, или фраз. Программа проверяет, есть ли команда в списке, выводит команду на экран и выполняет её. Если текст не распознан программа выводит сообщение об этом. Все это повторяется в бесконечном цикле. Завершение работы программы производится командой «стоп» или нажатием клавиши возврат. Геометрические размеры взяты относительными, чтобы автоматизировать привязку на разных экранах с разными размерами и разрешением, что не всегда получается. Круги, которые рисуются на экране, являются объектами и номеруются автоматически по мере их создания.
Команда GR.SHOW 2 — означает показать круг, который был создан вторым. Его номер содержится в n4. Можно было написать GR.SHOW n4. В строке IF (theText$=«вперед») THEN kom$=«вперёд» вы заметите различие в значениях величины в команде присваивания — «вперед» и «вперёд». Дело в том, что STT упорно возвращает «вперед», хотя бывают случаи «вперёд», тогда программа не распознает команду. От этого можно было избавиться, но я не стал усложнять программу, а просто поправил написание при выводе на экран. Еще бывают сбои при распознавании команды «влево». Впрочем, возможно это особенности моего произношения.
К сожалению, я не могу вставить сюда клип показывающий работу программы.
Посмотрите здесь.
Источник
Собираем свою Bluetooth машинку с управлением на Android
На последней сессии я как обычно тщательно готовился к экзаменам (то есть не знал, чем себя занять), и как по счастливой случайности, у меня образовалась радиоуправляемая машинка, большая и красивая, хотя и явно рассчитанная на детей. Поигравшись минут десять, я захотел ее модернизировать, а именно вместо неудобного джойстика с радиусом действия в 3 метра использовать коммуникатор с bluetooth. И удобнее, и дальность действия больше, и явно видны дальнейшие улучшения, о которых, как впрочем и о процессе прикручивания коммуникатора к детской машинке, и пойдет речь в данной статье.
Выбираем компоненты
В прошлом мы с приятелями написали собственную прошивку для роботов Lego Mindstorms NXT, поддерживающую удалённое управление роботом по bluetooth с Android-коммуникатора. Для экспериментов тогда была приобретена отладочная плата Olimex SAM7 с ARM7 на борту, которую в этот раз можно использовать в качестве управляющего контроллера.
В качестве шасси используем корпус игрушечной машинки.
Нужен bluetooth-модуль. Результат хотелось получить быстро, поэтому модуль был выбран из единственного доступного в магазине на тот момент BTM-112, хотя он оказался сравнительно дорогим.
Кроме того, оказалось, что управление с платы не может идти напрямую на моторы, нужен усиливающий контроллер (об этом чуть позже).
В сумме наши компоненты:
- Машинка
- Управляющий контроллер Olimex SAM7
- Bluetooth-модуль BTM-112
- Контроллер для управления моторами L298N
Теперь все необходимое у нас есть.
Соединяем bluetooth с управляющей платой
Для начала настроим доставку команд управляющему блоку. Схема соединения bluetooth-модуля и контроллера простая: по сути дела это UART с некоторыми управляющими ножками, то есть надо лишь присоединить модуль к интегрированному UART-контроллеру.
Программная составляющая не сильно сложнее. При соединении модуль пишет строку вида «CONNECT RE:MO:TE:BT:MA:CC xxx \r\n» , а при отсоединении — «DISCONNECT xxx \r\n» . Задача драйвера состоит в наблюдении за потоком символов и, в случае если сейчас активно соединение, передаче потока управляющему приложению. В итоге драйвер представляет собой конечный автомат, у которого переключение состояния означает переключение функции-обработчика.
Удалённое управление
Как было обещано, удаленное управление осуществляется с помощью Android-коммуникатора.
Наше прошлое приложение для Android (которое управляло Lego Mindstorms NXT, тоже посредством bluetooth) с помощью акселерометра отслеживало наклон коммуникатора и посылало соответствующие команды управления на NXT. Так что наиболее простым решением стало добавление протокола управления машинкой в уже существующее приложение. Сам протокол достаточно примитивен: фиксированная длина команды, фиксированный заголовок, после чего управление по осям X и Y.
Итак, на данном этапе мы можем “порулить” нашей платкой, правда моторы пока не подключены, так что индикация движений производится встроенными светодиодами (видео, к сожалению, нет, в этот момент снял только фотку), но всё равно прогресс есть, он виден, и это греет душу.

Соединяем управляющую плату с моторами
Изначально я думал, что смогу использовать управление со старой платы (зашитой в саму машинку), но оказалось, что использовать её в чистом виде нельзя, поскольку управление моторами было крепко сцеплено с радиочастью. Управлять моторами напрямую с ног головного контроллера тоже не получится из-за малой выходной мощности микросхемы. К сожалению, опыта в этой области у меня нет никакого (все-таки я программист, а не схемотехник), поэтому пришлось прибегнуть к помощи знакомых. По совету я взял микросхему усилителя L298N (избыточную для моих нужд, зато работающую из коробки) и собрал референсную схему.
Напомню, препарируемая машинка детская, и управление у нее немного хромает; когда я начал разбираться с моторами, я понял одну из причин. Для механизма поворота используется не сервопривод, а обычный электродвигатель, который может находиться в одном из трех состояний (выкл., вперед и назад). Таким образом, о плавном повороте мечтать не приходится.
В общем, функционально схема простая, один мотор используется как двигатель, второй мотор — как руль (у него стоит блокиратор на определенном угле поворота).
Для управления каждым мотором нужно подать напряжение на соответствующие управляющие ноги (положительное или отрицательное напряжение либо нуль). Напряжение измеряется между двумя точками (входными ногами управления), то есть мне нужно подавать напряжения на пару управляющих ног как-то так:
| forward | reverse | off | ||
|---|---|---|---|---|
| PIN1 | 1 | 0 | 0 | 1 |
| PIN2 | 0 | 1 | 0 | 1 |
Так как Android-приложение передает плавное управление, состояние моторов изменяется по преодолению заданного порога.
Код получился очень простой, я не буду приводить его здесь, но в конце поста есть ссылки на исходники всего проекта.
Понятно, есть недостатки:
- Дискретное управление лево/право, вперед/назад. Сейчас управление моторами осуществляется с помощью GPIO, но выбранные для управления линии могут быть переназначены под PWM контроллер. Таким образом, повороты и ускорение будут плавным.
- Дорогой усилитель. Тут всё просто, заменить на более дешёвую микросхему или схему на нескольких транзисторах.
- Скромные возможности. Раз управление осуществляется с помощью смартфона, то можно как-либо расширить функциональность по сравнению с просто пультом управления.
Источник



