- РОБОТ на базе: android, arduino, bluetooth. Рефлексный. Часть 2
- Оглавление
- Постановка задачи
- Немного теории
- Краткая информация по используемым деталям и модулям
- Сборка робота и подключение всех модулей
- Скетч для Arduino ШАГ 1 – Удаленное управление роботом
- Android приложение ШАГ 1 – Удаленное управление роботом
- Скетч для Arduino ШАГ 2 – Режим автономного управления роботом
- Android приложение ШАГ 2 – Режим автономного управления роботом
- РОБОТ на базе: android, arduino, bluetooth. Начало
- Приступим к работе
РОБОТ на базе: android, arduino, bluetooth. Рефлексный. Часть 2
Оглавление
Статья 1. РОБОТ на базе: android, arduino, bluetooth. Начало
Статья 2. РОБОТ на базе: android, arduino, bluetooth. Рефлексный. Часть 2.
Предполагается, что человек читающий статью уже имеет представление о:
-Базовых понятиях электроники
-Предыдущей статье
Постановка задачи
Создать робота который выполняет следующий функционал:
-Имеет удаленное управление при помощи смартфона (передвижение вперед, назад, налево, направо)
-Передает на смартфон данные о расстоянии до объекта находящегося перед ним(на базе ультра звукового датчика)
-Имеет режим автономного управления: непрерывно перемещается по помещению, при встрече препятствий меняет направление своего движения, тем самым объезжая препятствие.
Немного теории
Наш мир является сложнейшей системой, в которой взаимодействуют между собой огромное количество объектов, подчиненных определенным законам физики, поэтому создание робота функционирующего в рамках этой системы, является очень трудоемкой задачей. Для упрощения процесса создания первого робота воспользуемся понятием абстрагирования среды(в которую помещен робот) и действий робота. В дальнейших статьях будем усложнять среду и соответственно действия робота.
Абстрагирование среды
Среда где будет обитать наш первый робот будет представлять собой двухмерный мир и обладать следующими характеристиками:
1) Полностью наблюдаемая, т.е. датчики робота предоставляют доступ к полной информации о состоянии среды в каждый момент времени. Полностью наблюдаемые варианты среды являются удобными, поскольку роботу не требуется поддерживать какое-либо внутреннее состояние для того, чтобы быть в курсе всего происходящего в этом мире.
2) Детерминированная. Если следующее состояние среды полностью определяется текущим состоянием и действием, выполненным роботом, то такая среда называется детерминированной; в противном случае она является стохастической.
3) Эпизодическая. В эпизодической проблемной среде опыт робота состоит из неразрывных эпизодов. Каждый эпизод включает в себя восприятие среды роботом, а затем выполнение одного действия. При этом крайне важно то, что следующий эпизод не зависит от действий, предпринятых в предыдущих эпизодах. В эпизодических вариантах среды выбор действия в каждом эпизоде зависит только от самого эпизода.
4) Статическая. Если среда может измениться в ходе того, как робот выбирает очередное действие, то такая среда называется динамической для данного робота; в противном случае она является статической.
5) Непрерывная — Различие между дискретными и непрерывными вариантами среды может относиться к состоянию среды, способу учета времени, а также восприятием и действиям агента. В нашем случае считается что состояние среды меняется непрерывно. К примеру игра в шахматы является дискретной, так как имеет конечное количество различных состояний.
6) Одноагентная это среда в которой находится один объект(робот), и другие объекты на него не влияют и не конкурируют с ним.
Абстрагирование действий робота
1) Движение – робот может передвигаться в двух направлениях(взад, вперед) и разворачиваться на месте(налево, направо)
2) Датчики робота (ультразвуковой сенсор), позволяет определить расстояние до объекта. Расстояние может быть определено от 0,02 метра до 4 метров.
Таким образом, определим, что создаваемый в этой статье робот является простым рефлексным роботом. Подобные роботы выбирают действия на основе текущего акта восприятия, игнорируя всю остальную историю актов восприятия.
Краткая информация по используемым деталям и модулям
Драйвер двигателей HG7881. Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателей. 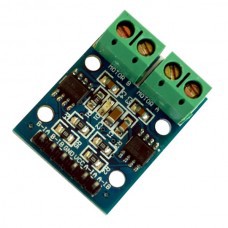
HG7881 – это двухканальный драйвер двигателей, питание возможно от источника 2,5 – 12 В. Описание выходов драйвера:
Таблица 1
| Вывод | Описание |
| B-IA | Двигатель B Вход A (IA) |
| B-IB | Двигатель B Вход B (IB) |
| GND | Земля (Минус) |
| VCC | Рабочее напряжение 2.5-12V (Плюс) |
| A-IA | Двигатель A Вход A (IA) |
| A-IB | Двигатель A Вход B (IB) |
Для того чтобы заставить двигатели работать нужным нам образом на выводы (B-IA, B-IB, A-IA, A-IB) необходимо подавать логические сигналы (HIGH,LOW). Таблица истинности двигателей:
Таблица 2
| IA | IB | Состояние двигателя |
| L | L | Off |
| H | L | Forward |
| L | H | Reverse |
| H | H | Off |
Ультразвуковой сенсор измерения расстояния HC-SR04. Определяет расстояние до объекта, измеряя время отражения звуковой волны от объекта. 
Сенсор излучает короткий ультразвуковой импульс (в момент времени 0), который отражается от объекта и принимается сенсором. Расстояние рассчитывается исходя из времени до получения эха и скорости звука в воздухе.
На вывод (Trig) подаётся импульс длительностью 10 мкс, ультразвуковой модуль излучает 8 пачек ультразвукового сигнала с частотой 40кГц и обнаруживает их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле:
Ширина импульса/58 = расстояние в см.
Сборка робота и подключение всех модулей
Собираем платформу (рис.2). 
Рисунок 2
Подключаем двигатели к драйверу (рис. 3). По два двигателя на один разъем драйвера, т.е. двигатели левой стороны платформы к разъему “Motor B”, двигатели правой стороны — “Motor A”. Управление платформой будет произведено аналогично гусеничной. При движении вперед и назад все двигатели работают синхронно в одном направлении, при повороте направо двигатели правой стороны платформы останавливаются, а левой двигаются синхронно, при повороте налево двигатели левой стороны останавливаются, а правой двигаются синхронно. 
Рисунок 3
Прикручиваем верхнюю часть платформы. Соединяем драйвер двигателей, ардуино, аккумуляторы, БТ модуль и ультразвуковой сенсор к макетной плате (рис.4) 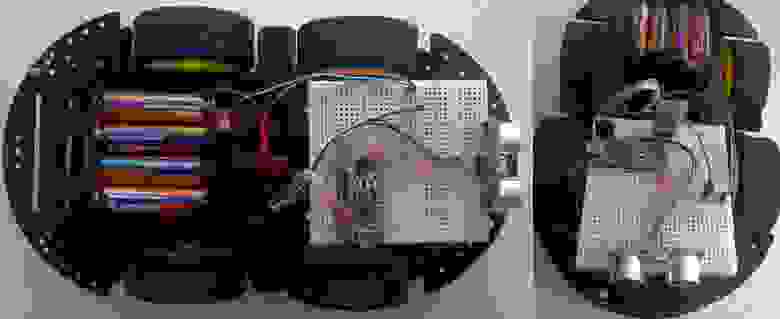
Рисунок 4
Схема подключения представлена на (рис.5). Питание ардуино, ультразвукового сенсора и драйвера двигателей (следовательно и самих двигателей) обеспечивают 4 подключенных последовательно аккумулятора (1,2 В., 2700 мА/ч), на БТ модуль питание подается от выхода ардуино 3,3 В. 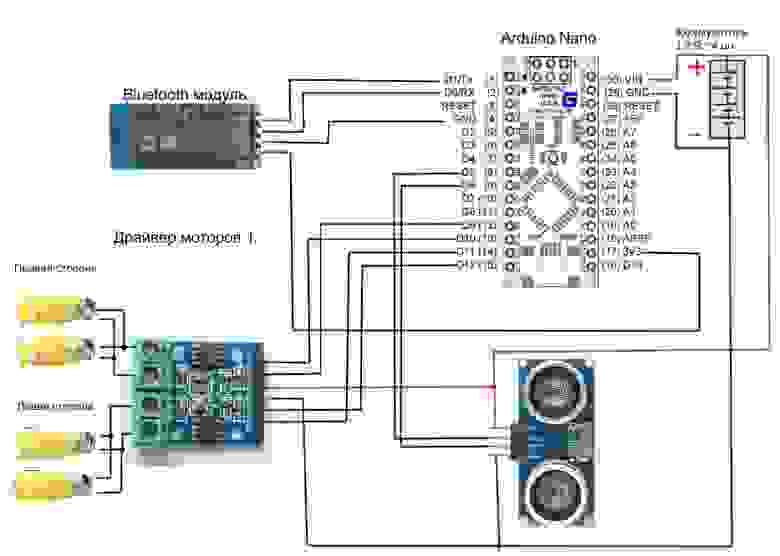
Рисунок 5
Робот собран, необходимо его заставить выполнять команды, отправленные с андроида.
Скетч для Arduino ШАГ 1 – Удаленное управление роботом
Объявляем переменные: R_A_IA, R_A_IB – определяют номера выводов управляющих двигателем А (двигатели правой стороны), L_B_IA, L_B_IB — выводы управляющие двигателем B(двигатели левой стороны. Инициируем последовательное соединение и задаем скорость передачи данных в бит/c (бод) – 38400. Устанавливаем режим работы выводов управляющих двигателями – OUTPUT (выходы). Подаем на все выходы значение HIGH, что означает — двигатели отключены(таблица 2).
Определяем функции: go_forward(), go_back(), go_right(), go_left(), stop_robot(), которые запускают двигатели в прямом или обратном направлении вращения, тем самым приводя робота в движение – вперед, назад, направо, налево, стоп, соответственно.
В основном цикле программы происходит считывание и обработка данных полученных в последовательный порт от БТ модуля. В зависимости от полученной команды выполняется та или иная функция и по последовательному порту передается текст об ее выполнении.
Android приложение ШАГ 1 – Удаленное управление роботом
Вот так будет выглядеть основное activity: 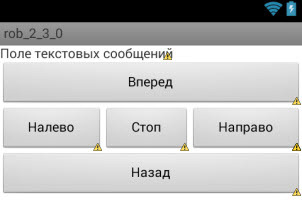
Текстовое поле «txtrobot», будет отображать всю необходимую нам информацию. Кнопки b0, b1, b2, b3, b4 будут отправлять команды в arduino (0, 1, 2, 3, 4)
Переходим в src/../MainActivity.java здесь и будет располагаться наш основной код.
В предыдущей статье на шаге 4, был представлен код позволяющий передавать и принимать данные по БТ. За основу возьмем этот код.
В состояния активити onPause() и onResume() добавим условие проверки существования БТ у андроида и определения включен ли он. В предыдущей статье это условие отсутствовало в связи, с чем при запуске приложения, если был отключен БТ, оно завершалось с ошибкой и только после этого предлагало включить БТ.
Объявим переменные для хранения кнопок:
Находим их по ID:
Напишем обработчики нажатия этих кнопок, для отправки команд:
Полный код приложения:
Данное приложение, позволяет управлять роботом при помощи андроида, отправляя команды по БТ на ардуино, и принимая текстовые ответы от него. Первая часть поставленной задачи выполнена.
Скетч для Arduino ШАГ 2 – Режим автономного управления роботом
Для работы с ультразвуковым сенсором, воспользуемся готовой библиотекой
ultrasonic-HC-SR04.zip
Распаковываем файлы и помещаем в каталог где расположен скетч
Подключаем библиотеку
Конструктор Ultrasonic принимает два параметра — номера выводов к которым подключены Trig и Echo, соответственно:
Получаем данные о расстоянии до объекта в сантиметрах:
Передаем данные на последовательный порт, для последующей передачи их через БТ модуль.
Символы «*» и «#» означают начало и конец передаваемого блока информации о расстоянии до объекта. Это необходимо для того чтобы четко отделять необходимые данные друг от друга, так как при их передачи часть теряется либо приходит с запозданием.
Полный скетч для загрузки в ардуино:
Android приложение ШАГ 2 – Режим автономного управления роботом
Таким образом, основное activity примет вид: 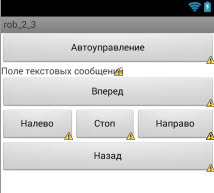
Объявим переменную b5:
И флаг позволяющий определить включен режим автоуправления или нет:
Находим ее по ID:
Создадим обработчик ее нажатия:
А также внесем изменения в обработчик кнопки «b0»(Стоп)
Осталось создать алгоритм позволяющий роботу самостоятельно перемещаться по помещению и объезжать препятствия.
Обработаем полученные данные о расстоянии до объекта отправленные ардуино. Если расстояние до объекта менее 50 см. то поворачиваем направо в противном случае едим прямо:
Ниже приведен полный код Activity:
Созданное приложение для андроида в связке с представленным скетчем ардуино, позволяет, как удаленно самостоятельно управлять роботом, так и включать режим автономного управление, при котором робот передвигается в прямом направлении и если требуется, объезжает препятствия.
Результатом проделанной работы является простейший рефлексный робот. Дальнейшее применение более сложных алгоритмов на базе приведенных шаблонных приложений и скетчей позволит создавать роботов основанных на модели, на цели, на полезности, обучающихся роботов и др.
К следующей статье я сделал заказ всего одного модуля:
| Наименование | Ссылка | Цена y.e | Цена руб | Кол-во | Сумма |
| Wifi модуль | dx.com/p/hi-link-hlk-rm04-serial-port-ethernet-wi-fi-adapter-module-blue-black-214540#.UutHKD1_sd0 | 14,99 | 524,65 | 1 | 524,65 |
ИТОГ: 524,65
В комментариях к предыдущей статье, хабра пользователь commanderxo порекомендовал не изобретать велосипед, а воспользоваться стандартным протоколом Firmata (протокол для обмена данными между ардуино и сервером). К сожалению работоспособной библиотеки, для андроида в связке с БТ, я не нашел. Написать свою библиотеку у меня не хватает времени и сил, поэтому в данной статье я продолжаю изобретать велосипед. Если кто из Хабра пользователей обладает информацией о такой библиотеке просьба поделиться.
Источник
РОБОТ на базе: android, arduino, bluetooth. Начало
Создание робота, даже простенького с ограниченным функционалом, довольно интересная и увлекательная задача. В последнее время любительская робототехника переживает настоящий бум, ей начали увлекаться даже те люди, которые от электроники очень далеки (к ним отношусь и я). Прошло то время, когда нужно было сидеть ночами с паяльником, или травить платы. Все стало гораздо проще, нужно лишь купить Arduino, комплект проводков, сенсоры, датчики, моторчики и вперед к сборке своего первого робота. Таким образом, фокус разработчиков — любителей сместился с электроники и механической части к программированию.
Данная серия статей будет содержать информацию для быстрого старта по созданию своего первого робота, от покупки необходимых деталей до его запуска в наш мир.
Отмечу, что статьи я пишу по ходу самостоятельного изучения материала и создания своего первого робота.
Предполагается, что человек читающий статью уже имеет опыт в:
- Установке и настройке среды разработки для android устройств.
- Написании первой программы Hello World для android устройства.
- Установке драйверов и среды разработки для Arduino.
- Написании первой программы (включать, выключать) светодиоды на Arduino.
Сокращения
БТ – Bluetooth;
Андроид – устройство с ОС android, к примеру, смартфон;
Скетч – приложение для Arduino;
Ардуино – Arduino Nano.
Общая схема робота
Пусть робот имеет следующую общую схему (рис.1). Андроид, является «головным мозгом», в котором обрабатываются все данные и проводятся вычисления. На основании результатов вычислении по БТ каналу передаются команды, принимаемые БТ модулем и в дальнейшем поступающие по последовательному порту в Arduino. Arduino обрабатывает поступившие команды и выполняет их при помощи «мышц» (Моторы светодиоды и др.). Кроме того в Arduino поступают данные от «органов чувств» (сенсоры, датчики и др.), которые он приводит в удобный вид и отправляет при помощи БТ модуля в «головной мозг». И так все повторяет до бесконечности. 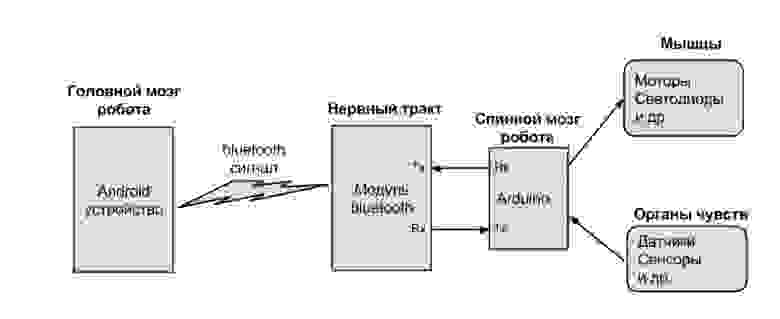
Рисунок 1
Обоснование именно такой схемы робота следующее:
-БТ модуль и Arduino Nano имеют низкую стоимость, а также маленький объем и вес.
-Андроид, не дорогое и доступное устройство, уже имеется у огромного количества людей, в том числе и у меня.
-Андроид имеет свои сенсоры, датчики и экран для вывода информации
-Простота написания кода для приложений как для андроида так и для ардуино.
Для упрощения задачи построения робота, предлагаю воспользоваться методом «от простого к сложному», т.е. как и при изучении языка программирования создадим первую программу «Hello word». Конечно, это будет не одна программа, а как минимум две (для ардуино и андроида). В каждой последующей статье функционал робота будет увеличиваться.
Постановка задачи
Собрать простенькое устройство, у которого имеются:
-2 кнопки (b1, b2).
-1 светодиод (Led).
И выполняется функционал:
-главное activity содержит 2 кнопки «Отпарвить 0» и «Отправить 1», при нажатии на которые от андроида к ардуино по БТ каналу передаются данные, соответствнно «0» и «1», ардуино их обработвает и зажигает либо тушит светодиод.
-данные о нажатии или отпускании кнопок от ардуино передаются в андроид, на экране главного activity выводится информация об этом.
Закуп необходимых деталей и узлов.
1) Android устройство – смартфон LG P500 (версия Android 2.3.3), либо любое другое устройство на базе Android версией 2.3.3 и выше. Цену не указываю, так как отдельно не покупал, а использую свой смартфон.
2) Arduino NanoV3.0 ( dx.com/ru/p/nano-v3-0-avr-atmega328-p-20au-module-board-usb-cable-for-arduino-118037 ) — 11,32$
3) Модуль Bluetooth ( dx.com/ru/p/bluetooth-board-module-4-pin-121326 ) — 10,57$
4) Макетные провода ( dx.com/ru/p/30cm-breadboard-wires-for-electronic-diy-40-cable-pack-80207 ) — 2,51$
5) Кнопки — 2шт., светодиод – 1 шт. – 50 рублей
Итого: 855,20 рублей.
Приступим к работе
Arduino
Соберем из имеющихся деталей схему (рис. 2) 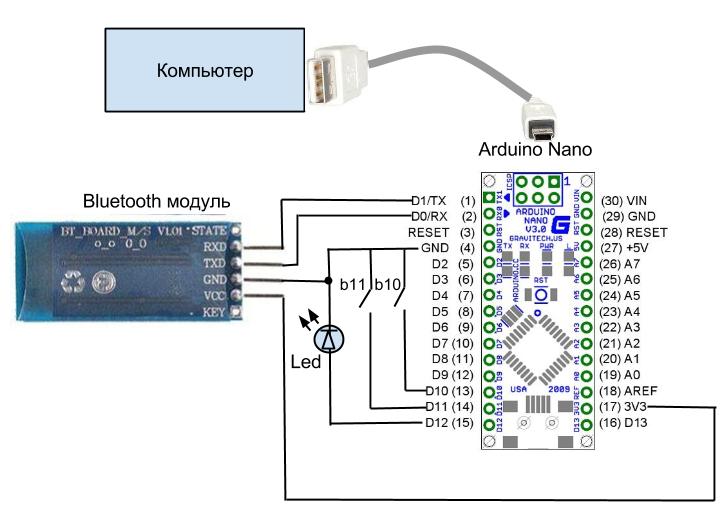
Рисунок 2
Питание на arduino подается по USB кабелю, который подключается к компьютеру, по нему же загружается и программное обеспечение (скетч) выполняемое на нем. Необходимо отметить, что загружать скетч в arduino можно только тогда, когда отключено питание от Bluetooth модуля (Вывод (17) 3V3), в противном случае возникает ошибка.
Подробности установки среды разработки Arduino и драйверов можно найти на официальном сайте: arduino.ru/Guide/Windows
Ниже приведен скетч который необходимо загрузить в ардуино:
Объявляем переменные, напротив каждой стоит комментарий.
Инициируем последовательное соединение и задаем скорость передачи данных в бит/c (бод). Мой БТ модуль работает на скорости 38400, но может быть скорость 9600 (скорость БТ модуля можно задавать при помощи AT команд). Устанавливаем режим работы заданного входа/выхода(pin) как входа или как выхода. Подаем HIGH значение на входы и выходы.
Функция void contact_bounce(int buttton) обрабатывает нажатие кнопок и позволяет устранить дребезг контактов, который возникает при соприкосновении или расхождении контактов в механических переключающих устройствах, таких, как кнопка, происходит многократное замыкание и размыкание.
В основном цикле Loop слушаем последовательный порт, и если на него пришли данные мы их обрабатываем. Кроме того вызываем функцию обработки нажатия кнопок и устранения дребезга контактов.
Загрузив скетч в ардуино, можем проверить его работоспособность – запустив монитор порта. При нажатии кнопок в окне монитора будет выводиться надпись «Press button b». Проверить работу светодиода удастся только после написания приложения для андроида.
В данной статье для ардуино будет использоваться только этот скетч.Приступим к разработки приложения для андроида.
Android
Для удобства отладки приложения андроида, рекомендую использовать не «Android virtual device», а реальный смартфон с ОС Android версии от 2.3.3 подключенный через USB кабель к компьютеру в режиме «Отладки». Существует огромное количество статей как это сделать.
Android ШАГ 1
Создаем новый проект «Android application project»
Для работы с БТ необходимо выставить права на использование его нашим приложением. Для этого заходим в манифест, выбираем закладку Permissions, нажимаем add, далее Uses permission, и устанавливаем следующие права: android.permission.BLUETOOTH, android.permission.BLUETOOTH_ADMIN
Теперь оформим основное activity, в res/layout/activity_main.xml поместим код:
Таким образом, основное activity примет вид: 
Рисунок 3
Текстовое поле «txtrobot», будет отображать всю необходимую нам информацию. Кнопки b1 и b2, будут отправлять команды в arduino.
Теперь переходим в src/../MainActivity.java здесь и будет располагаться наш основной код. Подключим пакет Api для Bluetooth:
Перед тем как использовать БТ необходимо убедится, что в нашем андроиде он присутствует. Создадим экземпляр класса BluetoothAdapter (отвечающий за работу с установленным в андроиде БТ модулем):
Если андроид не имеет БТ то будет возвращено null:
В данном виде программу уже можно запустить. На экране андроида вы должны увидеть надпись: «Bluetooth присутствует».
Теперь необходимо убедиться, что БТ включен, либо предложить его включить. Добавим константу:
Запустив измененное приложение на андроиде, Вам будет выдан «Запрос разрешения на включения Bluetooth», подтвердив его, тем самым Вы активируете БТ.
Полный код приложения:
Android ШАГ 2
Для дальнейших экспериментов, необходимо «спарить» наш андроид и БТ модуль, для этого на андроиде в настройках БТ, выполним поиск и подключимся к БТ модулю, пароль «1234».
Если вдруг удаленный БТ модуль не будет нормально работать, просто отключите от него все провода (VCC, GND,RX,TX), тем самым сделав жесткую перезагрузку, и снова подключите их — это должно помочь.
Теперь попробуем программно подключится к удаленному БТ модулю: основной код подключения разместим в onResume. onResume – это одно из состояний нашего Activity, а именно, Activity видно на экране, оно находится в фокусе, пользователь может с ним взаимодействовать. Ниже приведен основной код Activity:
Доступ к удаленному БТ модулю получаем по его МАС адресу btAdapter.getRemoteDevice(MacAdress). Узнать MAC-адрес БТ модуля можно, при помощи программы для андроида: Bluetooth Terminal.
Что бы убедится, что доступ к БТ модулю получен, используем метод getName(), который позволяет получить имя удаленного БТ модуля, и выводим результат на экран андроида.
Также в этом примере, была добавлена возможность ведения лога, который по ходу выполнения программы можно просматривать, и обнаруживать существующие ошибки. Кроме того создана функция MyError, которая вызывается в том случае если нужно аварийно завершить приложение.
Запустив приложение, на экране андроида в текстовом поле «txtrobot» отобразится имя удаленного БТ модуля.
Android ШАГ 3
Доступ к удаленному БТ модулю получен, следующий наш шаг передать данные от андроида к нему. Для этого в onResume(), создадим сокет:
где UUID (Universally Unique Identifier) — это стандарт идентификации, используемый в создании программного обеспечения. Добавим в определение константу UUID:
Чтобы не тормозить соединение отменим поиск других БТ устройств:
При не удаче закроем сокет:
Так как методы отправки и получения данных являются блокирующими, их следует выполнять в отдельном потоке, что бы предотвратить зависание основного приложения. Для этого создадим класс:
В конструкторе public ConnectedThred(BluetoothSocket socket) создается объект управляющий передачей данных через сокет:
Для отправки данных из главного activity вызывается метод sendData(String message) с параметром текстового сообщения, которое преобразуется к типу byte. Метод cancel() позволяет закрыть сокет.
Напишем, обработчики нажатия кнопок b1 и b2, содержащие вызов функции sendData(String message) и сделаем запись об этом в логе. Полный код приложения приведен ниже:
Написанное нами приложение, позволяет передавать по БТ от андроида к ардуино данные – «0» и «1», которые в свою очередь для ардуино являются командами «1» — зажечь светодиод, а «0» — потушить. Таким образом, с учетом общей схемы робота, мы научились отдавать команды от «головного мозга» к «мышцам». Осталось дело за малым, научить андроид принимать данные от «органов чувств».
Android ШАГ 4
Получение данных также как и отправку, необходимо выполнять в отдельном потоке, чтобы избежать зависание главного activity. Принятые данные от БТ модуля мы будем выводить на экран главного activity в текстовом поле – MyText. Но возникает трудность — работа с view-компонентами доступна только из основного потока. А новые потоки, которые мы создаем, не имеют доступа к элементам экрана. Для решения данной проблемы воспользуемся механизмом Handler.
Handler — это механизм, который позволяет работать с очередью сообщений. Он привязан к конкретному потоку (thread) и работает с его очередью. Handler умеет помещать сообщения в очередь. При этом он ставит самого себя в качестве получателя этого сообщения. И когда приходит время, система достает сообщение из очереди и отправляет его адресату (т.е. в Handler) на обработку.
Объявим Handler:
Источник



